教育・研究Research
教授 上羽 正純(UEBA, Masazumi)
居室番号:B202
TEL/FAX : 0143-46-5346
E-mail : ueba@muroran-it.ac.jp
| 専門 | 誘導制御工学、衛星搭載アンテナ指向方向制御、軌道力学、衛星通信 |
|---|---|
| 出身 | 東京大学大学院 |
| 前職 | 日本電信電話(株)(NTT) |
| 担当授業科目 | 部:宇宙航行工学、航空宇宙制御工学Ⅱ、セミナーⅠ 大学院:航空宇宙誘導制御工学特論 |
| 研究室名 | 航空宇宙機制御研究室 |
航空宇宙機制御研究の紹介
主な研究内容
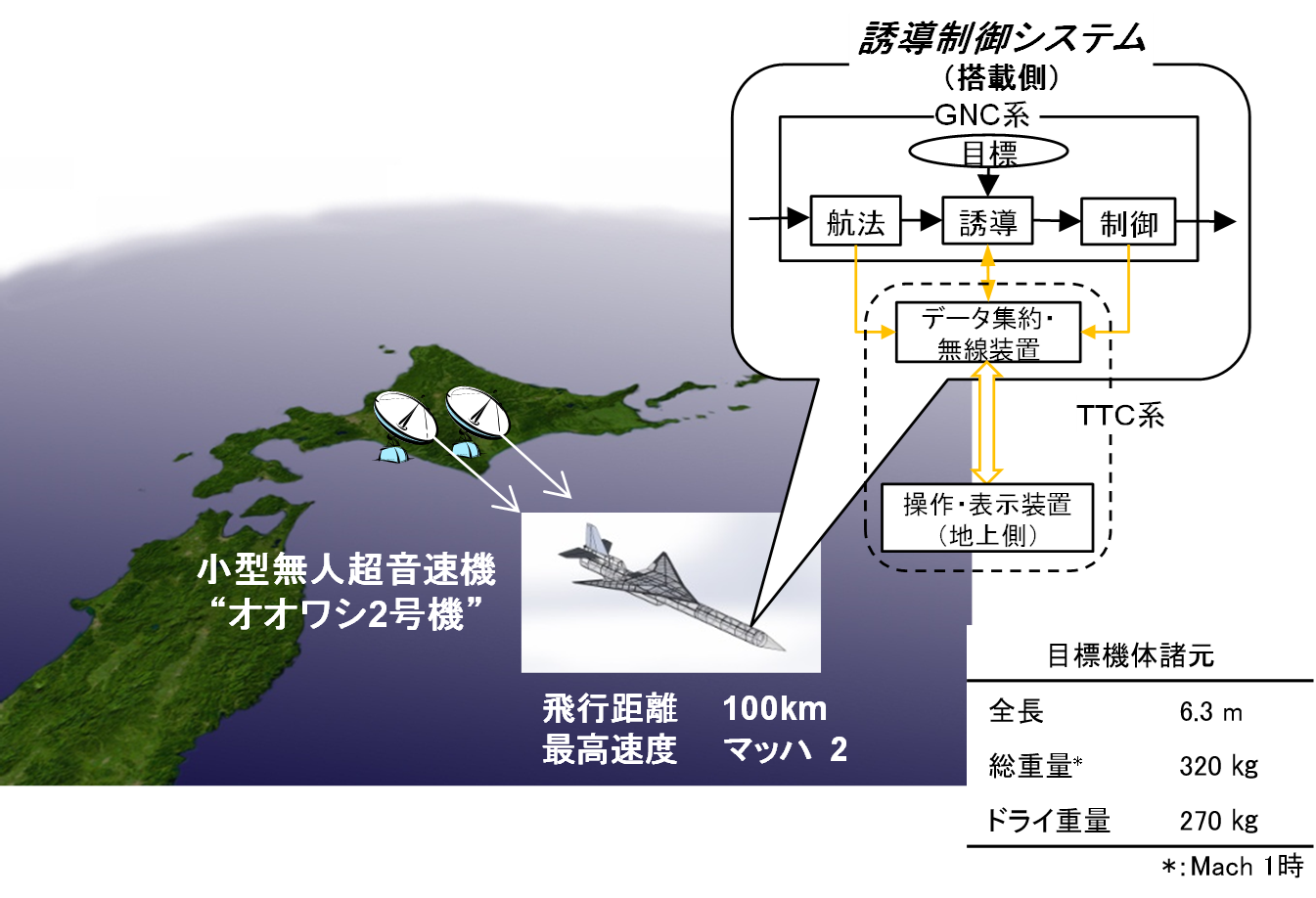
・本研究室では、超音速旅客機”、“スペースプレーン”実現のための自律飛行制御技術の研究開発を推進しています。
・この技術は、6mサイズの小型無人超音速実験(オオワシ2号機)を用いて超音速飛行させて実証することを目指しています。
小型無人超音速実験(オオワシ2号機)による飛行実証
研究開発の進め方
段階的に使用する機体をグレードアップによるフェーズを設け、機体に対応させて必要な技術を開発しています。
フェーズ1 :飛行能力が既知の機体で完全自律飛行制御の基本技術習得。
フェーズ2、3 : 機体固有の課題、長距離飛行の課題を解決
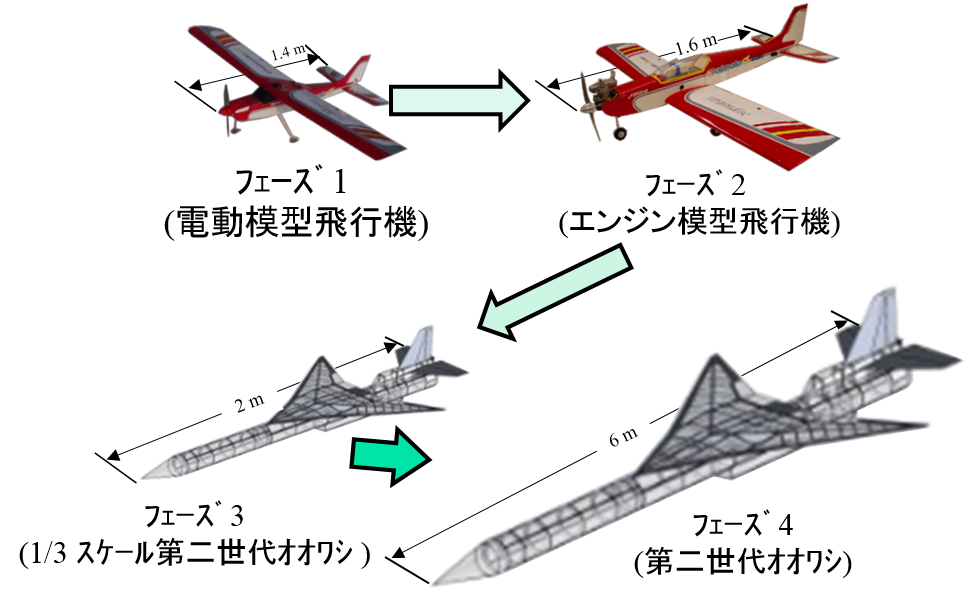
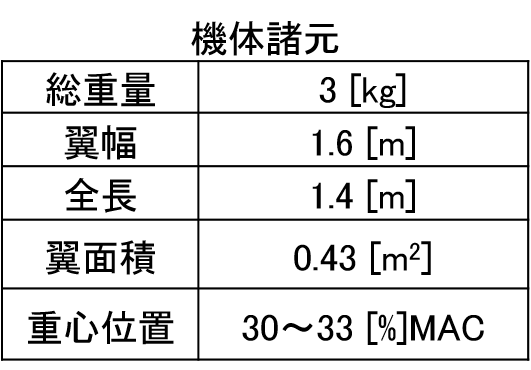
フェーズ1 電動模型飛行機による自律飛行制御
フェーズ1では電動模型飛行機を用いて自律飛行制御技術を開発しました。電動模型飛行機の外観及び諸元は下記の通りです。

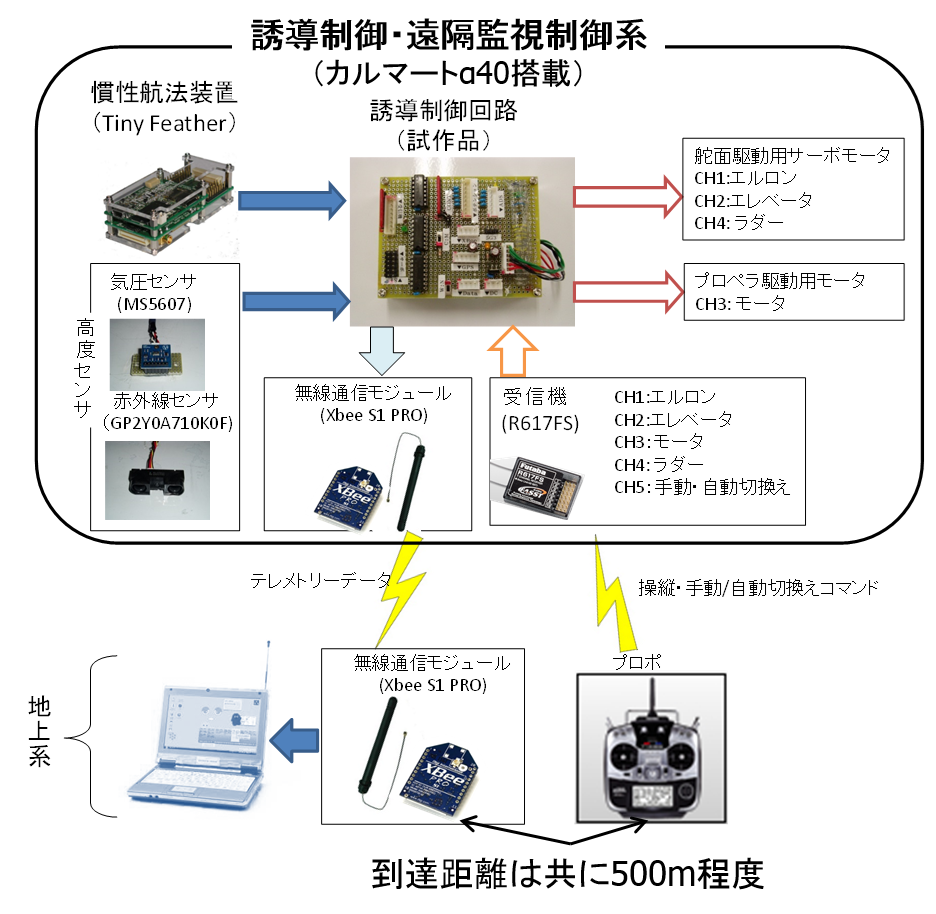
誘導制御・遠隔監視制御系構成
機体には、自律飛行のために、右に示すような誘導制御・遠隔監視制御系を搭載しています。
誘導制御回路以外は市販品を使用しつつ、飛行制御アルゴリズムは自前でプログラミングしています。
専門知識と市販ハードウェアがあれば、無人航空機の構築が可能です。
これまでの自律飛行制御達成
これまで、フェーズ1として電動模型飛行機を用いた、下記の飛行を実現してきました。2回の報道公開も行いました。
- 2012年度
- 自律制御の研究開始
- 2014年度
- 水平直線飛行、旋回飛行単独実施
- 2015年度
- 周回飛行、離陸、着陸制御単独実施
- 2016年度
- 周回飛行、着陸報道公開
- 2017年度
- 離陸~着陸までの完全自律飛行制御報道公開
現在、フェーズ2のエンジン模型飛行機、フェーズ3の3分の1 オオワシ2号機による自律飛行化を推進中です。
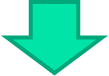
これら飛行制御実験は、白老町にある白老滑空場で実施しています。
白老滑空場及びその周辺(航空写真)
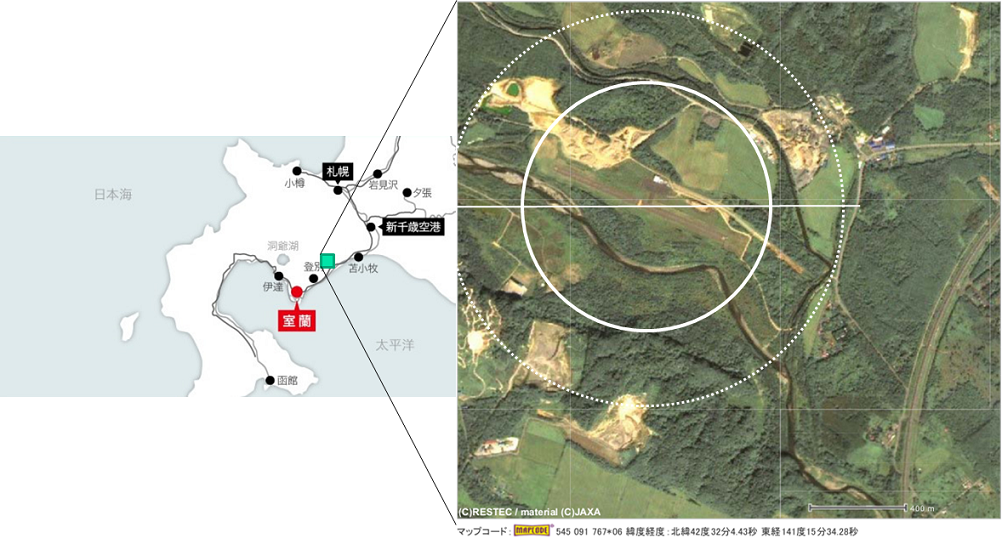
フェーズ1 離陸~着陸までの 完全自律飛行映像
完全飛行軌跡
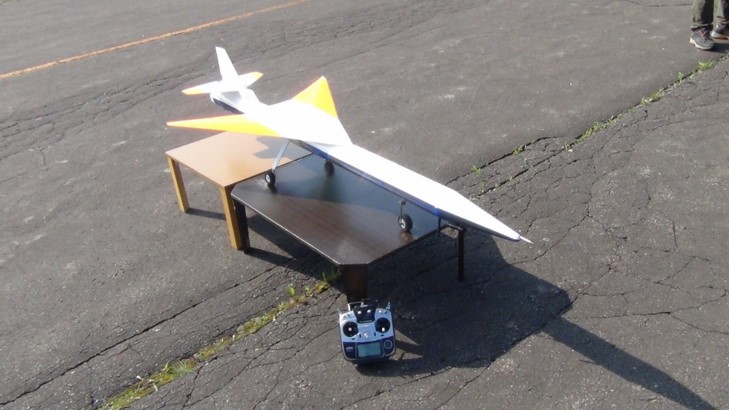
フェーズ2 エンジン模型飛行機手動飛行映像
プレフェーズ3 ジェットエンジン機手動飛行映像
フェーズ3 3分の1オオワシ2号機
3分の1オオワシ2号機: フルスケール機移行前の誘導制御技術確立用機体
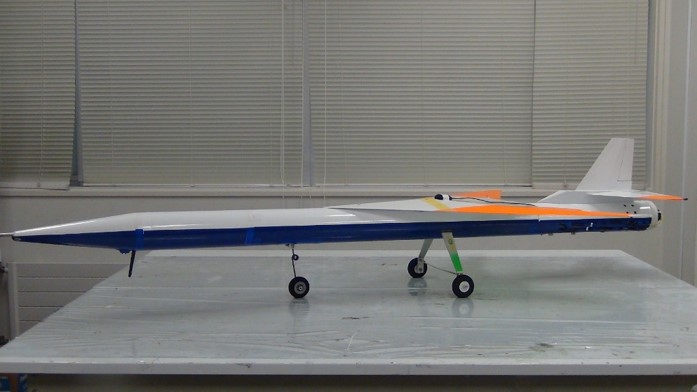
組み立て完了写真
自律飛行制御の研究実施方法
ソフト面では、制御則設計、シミュレーション、通信回線を設計しつつ、ハードウェア面では、機体の組み立て、誘導制御・遠隔監視制御系用各種機器の単体性能確認及び機体への実装を行います。この後、飛行試験を行います。
これにより下記のことが学べます。
・制御工学を中心としたシステム構築力
・制御以外の空力、構造、推進が飛行システムにどのように影響を与えるかを把握する力
・現場での飛行試験を効率よくための試験実施力
・自律飛行検証に必須の模型飛行機操縦の修得
3次元運動を体験ですが、操縦は楽しいです。
模型飛行機操縦訓練風景
研究に必要な模型飛行機操縦訓練を研究室レベルで定常的に実施しているのは全国でもここだけです。

操縦訓練紹介
模型飛行機操縦訓練の成果
研究実験室風景

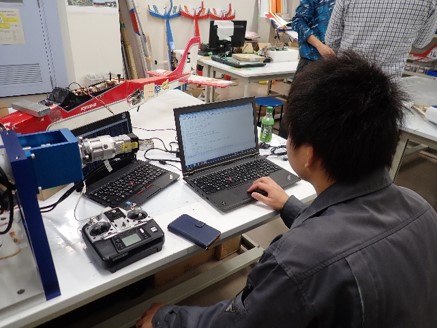
開発中(Yellow SCOPE等)
研究室

大学院生、学部生(卒研生)全員に一人1台のノートPC、机
<現在の受け持ち学生>
・大学院 :修士2年 3名、修士1年 2名
・学部生(卒研生):3名
3年生からの研究見習いも実施しています。
実験風景(白老滑空場)
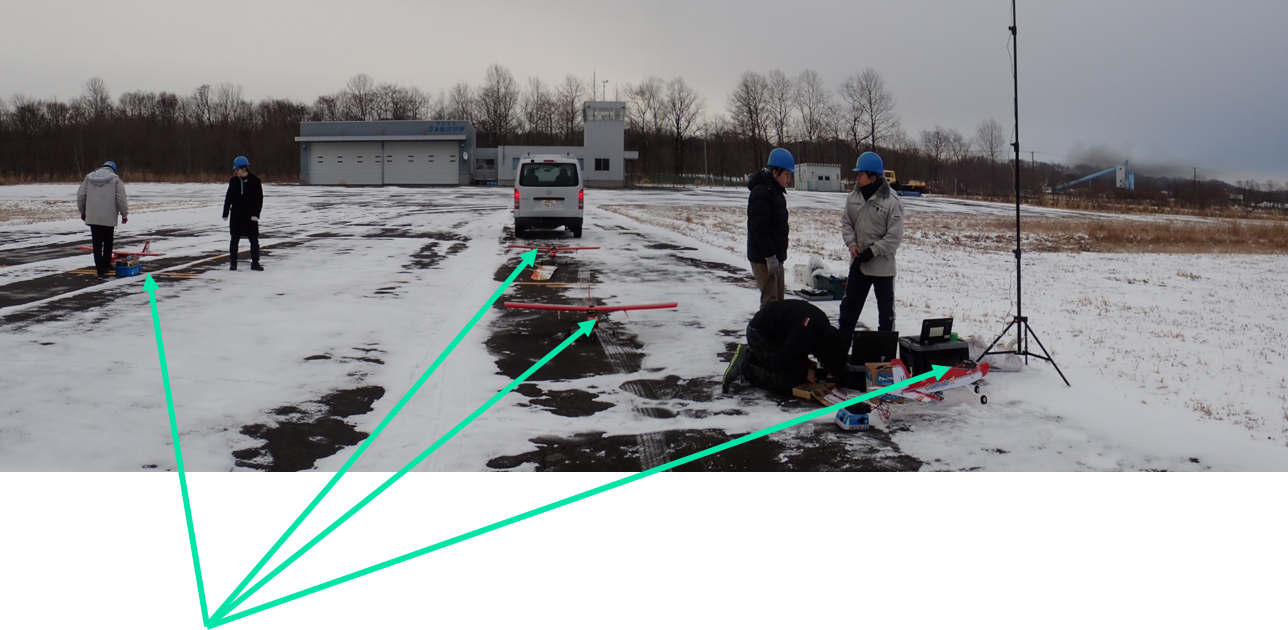
実験用電動模型飛行機(3台)+練習用エンジン模型飛行機(1台)
実験用には予備を常時用意。
毎週水曜日に飛行実験+操縦訓練
通常 教員1名+学生4~5名で実験。各学生が自分の研究テーマとして飛行実証。