教育・研究Research
助教 柴田 拓馬(SHIBATA, Takuma)

居室番号:B203号室
TEL/FAX : 0143-46-5322
E-mail : takuma.shibata@muroran-it.ac.jp
| 専門 | 制御工学 |
|---|---|
| 出身 | 総合研究大学院大学 物理科学研究科 宇宙科学専攻 |
| 前職 | キヤノン電子株式会社 衛星システム研究所 |
| 担当授業科目 | 学部:制御工学I,飛行力学II,宇宙機設計法,航空宇宙工学実験 |
| 研究室名 | 航空宇宙機制御研究室 |
航空宇宙機制御研究の紹介
主な研究内容
・本研究室では、宇宙機と航空機の制御システムについての研究を主に行なっています。
・宇宙機 : 電磁気力を利用した制御システムについての研究に取り組んでいます。また惑星探査技術についても検討を行っています。
・航空機 : 超音速旅客機”、“スペースプレーン”実現のため,6mサイズの小型無人超音速実験(オオワシ2号機)を用いた
自律飛行制御の精度向上を目指した技術について取り組んでいます。
磁束ピンニング効果を用いた非接触型微小擾乱抑制機構
磁束ピンニング効果 磁束ピンニング効果は,第二種超伝導体を磁場を印加した状態で冷却することによって生ずる現象です.以下の動画のように,回転軸以外の方向の変化に対して磁束ピンニング力と呼ばれる維持力が働くことで,第二種超伝導体と永久磁石間の相対距離と姿勢が維持されています.
提案する微小擾乱抑制機構
技術の発展とともに,より遠くの観測対象をより精度良く観測したという要求が高まっています。
この要求を満たすためには,宇宙望遠鏡内部に搭載されている機器が生じる擾乱の管理が重要です。
ここで私たちは磁束ピンニング効果を利用して,ミッション機器を積んでいるミッション部と,主に擾乱源となる機器を積んでいるバス部を機械的に分離し,磁束ピンニング力によって接続を行うことを提案しています.
この手法により熱と振動を抑制する非接触型の微小擾乱抑制機構の研究を行っています.

磁束ピンニング効果を用いた非接触微小擾乱抑制機構
静電力を利用した非接触ランデブードッキング技術
惑星探査において地球外の惑星からサンプルを取得し持ち帰るサンプルリターンミッションは,惑星の成り立ちを知るだけでなく,人類がどこからきたのかを知るための多くの情報が含まれている可能性があります。
微小重力惑星からのサンプルリターンにおいては,探査機が惑星表面近傍を周回しながらタッチダウン方式などの手法でサンプルを取得することができます。これに対し,重力天体の場合においてはローバ・ランダーがサンプルを封入したサンプルカプセルを小型ロケットで打ち上げ,軌道上で探査機とランデブードッキングを行う計画がされています。
こうしたサンプルカプセルのような非協力対象の状態を非接触で制御するための手法として,静電力を用いた研究を行っています。
円筒のサンプルコンテナをいくつかの球の塊として扱うことで簡易的に静電力を計算するMulti Sphere Model (MSM)[1]を適用することで,制御系を設計し,非接触で非協力体の角運動量を散逸させることが可能であることが数値計算で求められています.


Multi Sphere Model (MSM)[1]による静電力計算モデル(左)/円筒のサンプルコンテナ(右)
[1] : Daan Stevenson and Hanspter Schaub, 2013
磁力を利用したフォーメーションフライト技術
宇宙空間上で複数の衛星で編隊を構成し,観測ミッションを行うフォーメーションフライト技術が考えられています。
本研究では,様々な宇宙ミッションに応用できる電磁気力を用いたフォーメーションフライトの研究を行っています。
小型無人超音速実験(オオワシ2号機)による飛行実証
小型無人超音速実験機(オオワシ2号機)の制御システムに関わる研究に携わっています。研究開発の進め方としては以下のようなフェーズを経て研究課題に取り組みます。
・フェーズ1 : 飛行能力が既知の機体で完全自律飛行制御の基本技術習得。
・フェーズ2,3 : 機体固有の課題、長距離飛行の課題を解決

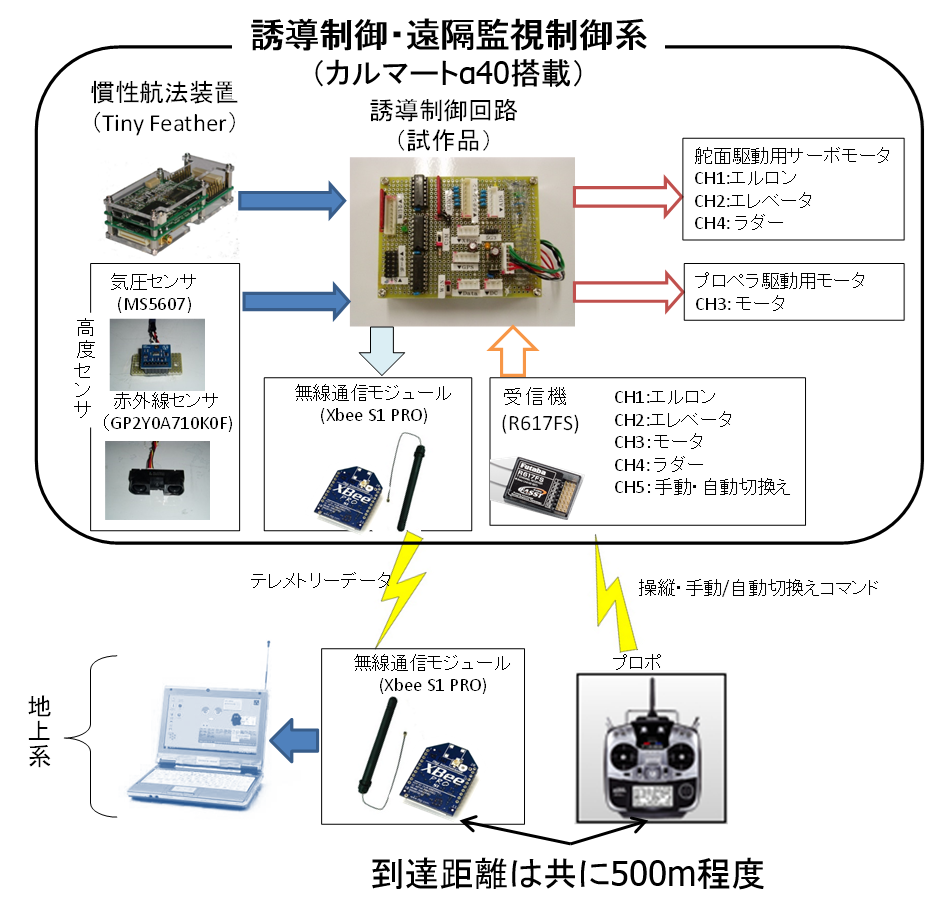
誘導制御・遠隔監視制御系構成
機体には、自律飛行のために、右に示すような誘導制御・遠隔監視制御系を搭載しています。
誘導制御回路以外は市販品を使用しつつ、飛行制御アルゴリズムは自前でプログラミングしています。
専門知識と市販ハードウェアがあれば、無人航空機の構築が可能です。
白老滑空場及びその周辺(航空写真)

自律飛行制御の研究実施方法
ソフト面では、制御則設計、シミュレーション、通信回線を設計しつつ、ハードウェア面では、機体の組み立て、誘導制御・遠隔監視制御系用各種機器の単体性能確認及び機体への実装を行います。この後、飛行試験を行います。
これにより下記のことが学べます。
・制御工学を中心としたシステム構築力
・制御以外の空力、構造、推進が飛行システムにどのように影響を与えるかを把握する力
・現場での飛行試験を効率よくための試験実施力
・自律飛行検証に必須の模型飛行機操縦の修得
3次元運動を体験ですが、操縦は楽しいです。
模型飛行機操縦訓練風景
研究に必要な模型飛行機操縦訓練を研究室レベルで定常的に実施しているのは全国でもここだけです。

毎週水曜日に飛行実験+操縦訓練
通常 教員1名+学生4~5名で実験。各学生が自分の研究テーマとして飛行実証。
静電力を利用した非接触ランデブードッキング技術
惑星探査において地球外の惑星からサンプルを取得し持ち帰るサンプルリターンミッションは,惑星の成り立ちを知るだけでなく,人類がどこからきたのかを知るための多くの情報が含まれている可能性があります。 微小重力惑星からのサンプルリターンにおいては,探査機が惑星表面近傍を周回しながらタッチダウン方式などの手法でサンプルを取得することができます。これに対し,重力天体の場合においてはローバ・ランダーがサンプルを封入したサンプルカプセルを小型ロケットで打ち上げ,軌道上で探査機とランデブードッキングを行う計画がされています。 こうしたサンプルカプセルのような非協力対象の状態を非接触で制御するための手法として,静電力を用いた研究を行っています。 円筒のサンプルコンテナをいくつかの球の塊として扱うことで簡易的に静電力を計算するMulti Sphere Model (MSM)[1]を適用することで,制御系を設計し,非接触で非協力体の角運動量を散逸させることが可能であることが数値計算で求められています.
[1] : Daan Stevenson and Hanspter Schaub, 2013
磁力を利用したフォーメーションフライト技術
宇宙空間上で複数の衛星で編隊を構成し,観測ミッションを行うフォーメーションフライト技術が考えられています。 本研究では,様々な宇宙ミッションに応用できる電磁気力を用いたフォーメーションフライトの研究を行っています。
小型無人超音速実験(オオワシ2号機)による飛行実証
小型無人超音速実験機(オオワシ2号機)の制御システムに関わる研究に携わっています。研究開発の進め方としては以下のようなフェーズを経て研究課題に取り組みます。
・フェーズ1 : 飛行能力が既知の機体で完全自律飛行制御の基本技術習得。
・フェーズ2,3 : 機体固有の課題、長距離飛行の課題を解決
誘導制御・遠隔監視制御系構成
機体には、自律飛行のために、右に示すような誘導制御・遠隔監視制御系を搭載しています。
誘導制御回路以外は市販品を使用しつつ、飛行制御アルゴリズムは自前でプログラミングしています。
専門知識と市販ハードウェアがあれば、無人航空機の構築が可能です。
白老滑空場及びその周辺(航空写真)
自律飛行制御の研究実施方法
機体には、自律飛行のために、右に示すような誘導制御・遠隔監視制御系を搭載しています。
誘導制御回路以外は市販品を使用しつつ、飛行制御アルゴリズムは自前でプログラミングしています。
専門知識と市販ハードウェアがあれば、無人航空機の構築が可能です。
自律飛行制御の研究実施方法
ソフト面では、制御則設計、シミュレーション、通信回線を設計しつつ、ハードウェア面では、機体の組み立て、誘導制御・遠隔監視制御系用各種機器の単体性能確認及び機体への実装を行います。この後、飛行試験を行います。
これにより下記のことが学べます。
・制御工学を中心としたシステム構築力
・制御以外の空力、構造、推進が飛行システムにどのように影響を与えるかを把握する力
・現場での飛行試験を効率よくための試験実施力
・自律飛行検証に必須の模型飛行機操縦の修得
3次元運動を体験ですが、操縦は楽しいです。
模型飛行機操縦訓練風景
研究に必要な模型飛行機操縦訓練を研究室レベルで定常的に実施しているのは全国でもここだけです。
毎週水曜日に飛行実験+操縦訓練
通常 教員1名+学生4~5名で実験。各学生が自分の研究テーマとして飛行実証。