超音波システム研究室
#強力超音波#アクチュエータ#振動制御#音響力#非線形音響#メディカルマイクロロボット


研究内容
固体・液中・気中の超音波振動を利用したモータや非接触搬送デバイスを研究しています。超音波には物を動かす力があることをご存知ですか。空気中・水中では物体に触れずに動かすことができます。さらに水中では超音波発生源自体も移動できます。また、固体では大きな力でゆっくり動かすことができます。超精密位置決め装置・非接触搬送装置・体内を移動する小型ロボットへの応用を目指しています。

研究テーマ
超音波の動力的応用の研究
青柳 学 教授
電気から超音波振動への変換を経て動力に変換する研究を行っています。超音波は固体・液体・気体の3つの媒質で伝搬することができますが、主に固体中と気体中の超音波を利用した”動かす”技術を研究しています。電圧を印加するとひずむ性質を持つ材料(圧電材料)を使い、超音波振動を弾性体に発生させます。この振動を利用して、接触または非接触に物体を搬送することができます。
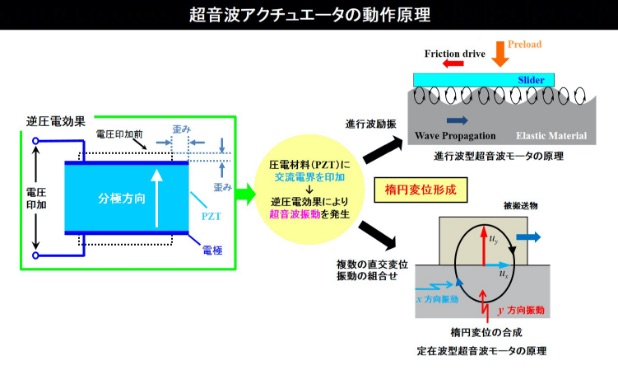
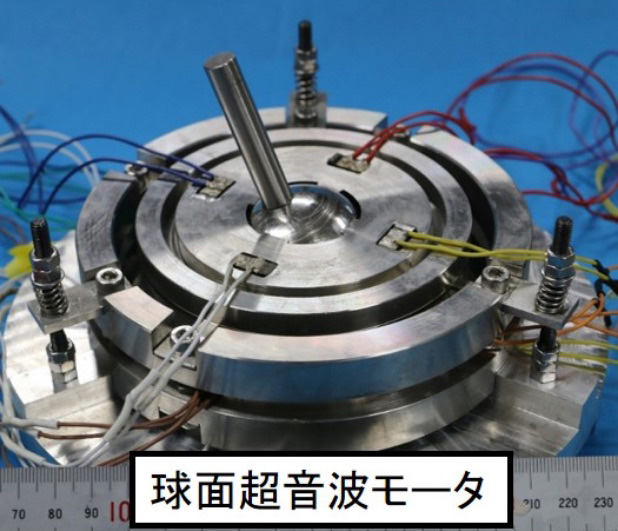
【接触搬送】進行波または複数の振動を組み合わせて、振動変位が回転するような振動が励振されると、接触したものが摩擦力で搬送される”超音波モータ”になります。この原理では回転動作はもちろんリニアモータも容易です。低速時に高トルクを発生し、自己保持力を持つため、減速機(ギヤ)やブレーキは不要です。小型で高トルク、静粛であるため、カメラのレンズ駆動に広く応用されています。現在は1台で3軸方向に回転できる”球面超音波モータ”に発展しています。通常のモータでは3軸方向の動作を実現するには最低3つのモータが必要ですが、球面超音波モータは一つで実現します。すなわち、システム全体の構造が単純になり、軽量化が望めるようになります。宇宙機や惑星探査ロボットのアーム駆動やロボットの関節などへの応用が期待されています。
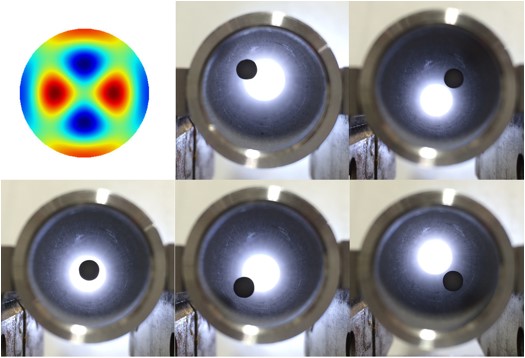
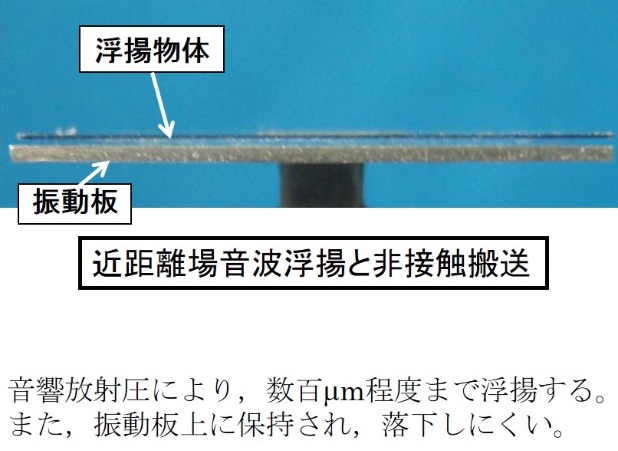
【非接触搬送】超音波振動子の近傍の平板状物体は強力な音響放射圧により浮揚します(近距離場音波浮揚現象)。また、強力な音圧により空気の流れ(音響流)が生じ、浮揚物体が音響粘性力により搬送されます。ガラスや樹脂など摩擦で表面が傷つきやすい物体の搬送や表面処理、検査などへの応用が考えられています。さらに複数の振動体による高度な音場制御により、浮揚物体の運動制御や2次元搬送も研究しています。近距離音場だけでなく、パイプ内に強力な音圧場を形成して、パイプ内で非接触搬送や粉体、高粘性材料の搬送も研究しています。
研究テーマ
超音波による液中自走式推進
孔 徳卿 助教
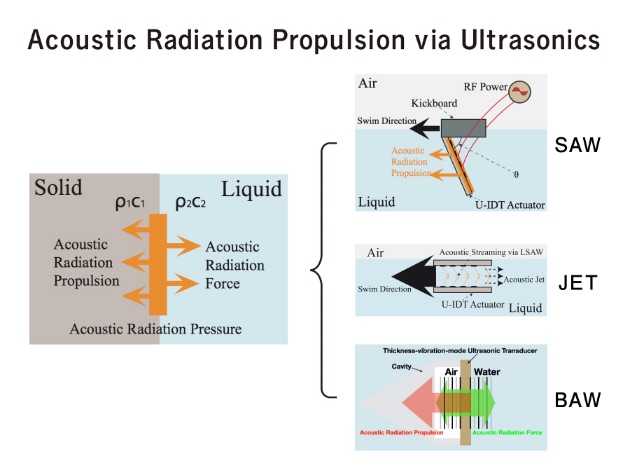
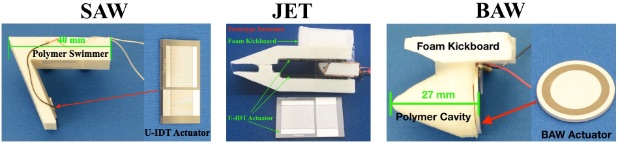
超音波素子による、固体から液体へと波動が放射するときに、界面に生ずる音響放射圧を音響放射推進力として利用し、ヒレやスクリューといった可動部を持たない、新たな液中自走式推進システムに関する研究を行う。
世界中、液中推進システムの駆動原理は、従来のプロペラ推進とバイオニックスイミングは液中でかなりの力を持っているが、機械的に大きく動く部分が存在し、微小化が難しい。自然界には、鞭毛や魚類に類似した生命体による微小な生き物が存在するが、推進力が不足している。他の代表例の生化学エネルギーと磁気エネルギーによるマイクロ推進システムは単純な構造だが、推進力も不足である。超音波素子による、固体から液体へと波動が放射するときに、界面に生ずる音響放射圧を音響放射推進力として利用し、ヒレやスクリューといった可動部を持たない、新たな液中推進システムである。駆動力源となる超音波振動子の周波数を高周波化による小型化が容易である。例えば,10-100MHzの周波数することで、振動振幅は10pm-10nmと極微小となるが振動速度は3m/s程度となり、大きな放射圧が出る。微小化しても単位面積当たりの推力は低下せず、高推力の実現が可能である。
単純な構造・高推力・小型化と低コストの利点を持ち、様々な実用性があるものを想定している。複数の振動子を用い、それぞれの振動振幅を増減することで、左右・上下の操舵を実現することができる。それぞれの振動子の印加する駆動電圧を増減することで、振動振幅は変化して推力を増減できるので、容易に操舵を実現することもできる。無線アンテナ給電システム・BluetoothかWi-Fiによる制御システムを使うと、液中ドローンの推進システムの開発が期待される。さらに、血管内ロボットの推進システムとしての応用である。従来のマイクロ推進システムでは、血流の影響で位置を維持し、上流に行くのが難しい。血管内ロボットの運動に対する有効な解決策はほとんどない。単純な構造と高推力の利点から考慮し、小型化弾性表面波スイマーでは血管内を動き回り診断を行ったり治療を行ったりすることが考えられる。低侵襲治療・ターゲット療法さらに5Gの遠隔医療に向け、血管内ロボットの推進システムの開発も期待される。