
国立大学法人 室蘭工業大学
航空宇宙機システム研究センター
プロジェクト研究
サブスケール高速走行軌道実験設備
高速走行軌道実験設備に関する基本的な要素技術は大型のフルサイズ走行設備への実装に先立ち、軌間5インチのサブスケール実験設備において実証されます。台車の加速は小型ジェットエンジンで行ない、1日に約15回の走行実験が可能です。これまでに、確度の高い測位方法の確立、水抵抗を用いた減速システムの抵抗係数の評価、機上搭載空力天秤の実証などを学術的な研究目的として実施しました。また、他大学との共同研究として東京都市大学・名古屋大学・筑波大学と次世代型航空宇宙エンジンの水平走行実証に本装置を供しています。2014年1月現在、サブスケール軌道装置で達成された最高速度は時速120km/hですが、測定装置などを搭載した状態での標準的な試験速度は80km/hとなります。

サブスケール高速走行軌道実験設備
確度の高い測位方法の確立
測位精度の問題は航空機や人工衛星などの飛翔体を開発する上で最も基本的なテーマの一つです。位置を測定し微分する手法、加速度を測定し積分する手法のいずれも一長一短であり、時間分解能と精度の両方を満足する位置・速度・加速度を得るにはいくつかの手法を併用する必要があります。高速走行軌道実験設備においてはGPSでは位置精度が不十分(1~2m程度)であり、直線軌道脇に設けられたフラグを光電センサでパスすることによりcmオーダーでの正確な位置情報を得ることが出来ます。この手法は米国でも古くから採用されており、特にナイフエッジでレール脇の信号線を断線する方式が有力とされています。フラグの間隔はあまり細かくは出来ませんので、これを2回積分して得られる加速度情報は時間分解能の点で不十分です。そこで、加速度センサ(CXL04GP)を機上に搭載し100Hzで収録しています。速度情報は位置情報の微分または加速度の積分で得られますが、場合によってはドップラー式スピードガンや対気速度を取得するピトーセンサを併用して検証します。ピトーセンサは差圧計のレスポンスも含め、十分に高速な応答性を有する必要があります。サブスケール装置では走行開始から停止までの時間は15秒程度であり、この範疇では積分誤差はごく小さく、加速度センサと光電センサから得られるデータはほぼ一致します。
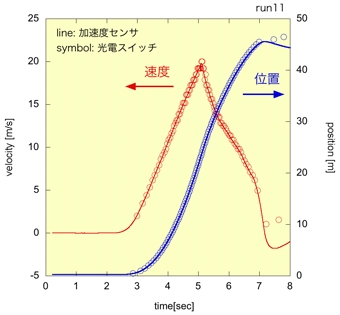
加速度センサ(ライン)の積分および光電センサ(丸印)の微分により得られる測位情報
水ブレーキの制動係数評価
最終的に超音速にまで達する走行台車(スレッド)を短距離で減速する手段として最も確実なシステムは、水の抵抗を利用する水ブレーキシステムです。これはレール間に設置された水路に台車下部に取り付けられた制動板(バケット)が突入するもので、その抵抗はバケットの浸水面積および突入速度の二乗に比例します。ところが、実際には水路に対する制動板の閉塞率や開水路の水位上昇等を考慮した修正係数が必要となります。このテーマは2011年度に東京大学との共同研究において詳細に検討され、各種バケット形状の水抵抗係数が実験およびCFD計算の両側面から明らかにされました。この成果はフルサイズ高速走行軌道設備における減速プロファイルの予測に活用されています。
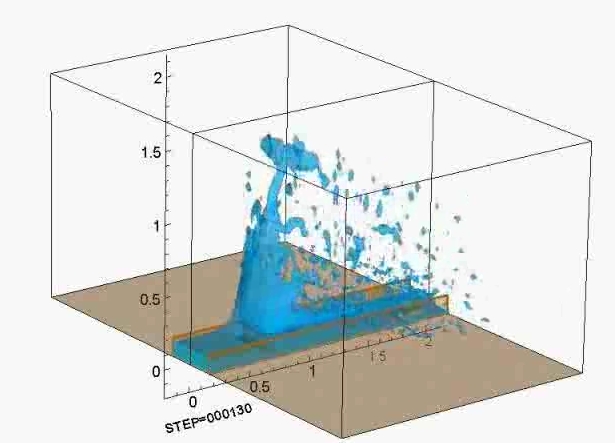
水制動係数の制動係数評価(CFD計算:東京大学渡邊・姫野研)
機上搭載天秤の実証
台車(スレッド)に機体やパラシュート等を搭載し空気抵抗を測定するための力覚センサ(ロードセル)はスレッドにかかる大きな加速度により慣性力を受けます。このため、本来測定したいレンジよりもずっと大きな秤量のロードセルを搭載しなければなりません。このことは測定精度の悪化につながります。そこで、慣性力をカウンターウェイトによってキャンセルし、空気抵抗の成分のみを測定する加速度補償型天秤を開発しています。全体構造としては平行四辺形のリンク機構を水平にしたロバーバル型で、ピッチ方向の曲げモーメントに強い高さのある構造となっています。最終的に、1%程度での精度を有する機上搭載天秤を目指して改良を続けています。
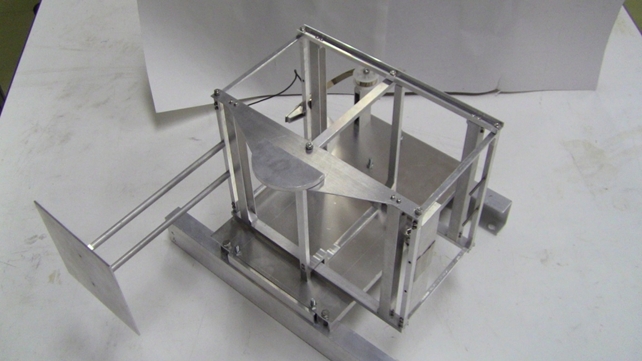
加速度補償型1軸抗力測定天秤