微小・狭所領域で自律移動可能なロボットを作る
SearchSeeds
研究者紹介Fuculty

Purpose
研究の目的
近年、老朽化が顕在化しているインフラ構造物の点検にロボット技術を応用した自動化が有効と考えられている。自動点検ではとう道、マンホール等のインフラ設備を始め、水道・ガス配管路内のような微小・狭所空間内で、ロボットが自律的に移動できることが求められる。本研究では、設備障害物に干渉することなく、閉鎖空間内に人が入らずに内部情報の取得を行うための小型ロボット機構の設計及び制御技術の検討を行っている。

Overview
研究の概要
微小・狭所領域で自律移動可能なロボットを作る
インフラ構造物の壁面と設置される設備との間に隙間がない場合に、狭い空間を壁面に貼り付きながら、内壁面の状態をモニタリングするために必要となる、自律移動可能な風圧利用型の微小壁面移動機構の研究を進めている。
T字管、エルボ管が複雑に組み合わされた微小配管内を自律走行可能な移動ロボットを実現するために、小型実装の観点から機能別ユニット構造と機構の簡略化をベースとした管内走行移動機構の小型化設計法の研究を進めている。

Seeds 01 微小・狭所領域で自律移動可能なロボットを作る
[PDF DL]Point
研究(開発)のアピールポイント
研究の新規制、独自性
画像取得などセンシング機能に特化した、機能別ユニット型ロボット構造としている。小型化した場合に、装置重量の軽減化や駆動力削減が可能となり、目的とする機能を実現するために有利な構造となることが期待できる。
研究に関連した特許の出願、登録状況
なし従来研究(技術)と比べての優位性
実用化されている移動ロボットの多くは、比較的大型の構造物を対象としている。そのまま小型化するには適していない構造が多い。機構簡略化と機能別ユニット構造、高密度実装を主眼とした小型化設計により、従来の点検ロボットで用いられるドローンやクローラ型移動ロボットでは対応が困難な微小・狭所領域を対象とすることが可能となる。
Vision/Stage
研究(開発)のビジョン・ステージ
適応分野
人手による作業が困難な、管路・タンク構造物、地下埋設構造物など微小・狭所領域での点検自動化研究のステージ
基礎研究製品化、事業化のイメージ
インフラ構造物の自動点検システム、点検メンテナンスサービス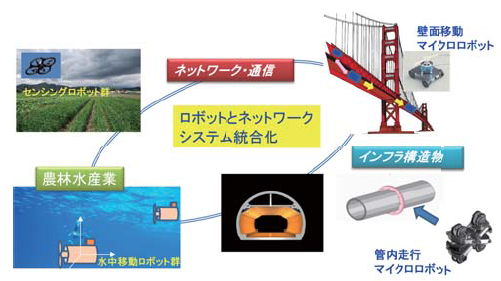
Suggestion/
Message
企業などへのご提案・メッセージ
研究(開発)に関連して、
あるいはそれ以外に関われる業務
微小駆動機構の位置決め制御、構造物モニタリングにおける物理量計測に関する技術相談
利用可能な設備、装置など

教員からのメッセージ
機構・アクチュエータの微小化技術をベースにロボット分野の研究を推進しています。これまで培って来たメカトロニクス応用技術で、何かお役に立てられればと思います。
気軽にご相談下さい。