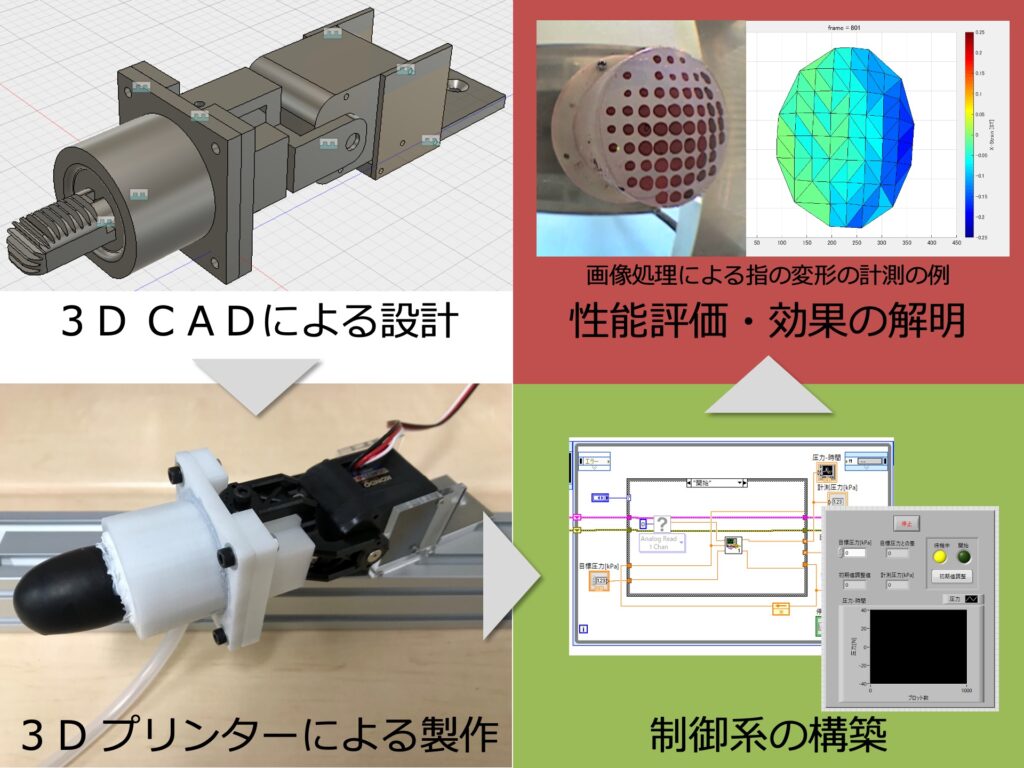
ロボットが人のように器用に物体を扱えることを目指して,柔らかい素材や構造でできたロボットの指やセンシング機能を内蔵した指の開発,評価,応用について研究を行っています.人の器用さには指の柔らかさが寄与しており,人のように柔らかい指をエラストマーや流体を用いて製作しています.さらなる指の物体把持・操作性能の向上を目指し,内部に特殊な機構を内蔵した指の開発を行っています.
ロボットが人のように器用に物体を扱えることを目指して,柔らかい素材や構造でできたロボットの指やセンシング機能を内蔵した指の開発,評価,応用について研究を行っています.人の器用さには指の柔らかさが寄与しており,人のように柔らかい指をエラストマーや流体を用いて製作しています.さらなる指の物体把持・操作性能の向上を目指し,内部に特殊な機構を内蔵した指の開発を行っています.