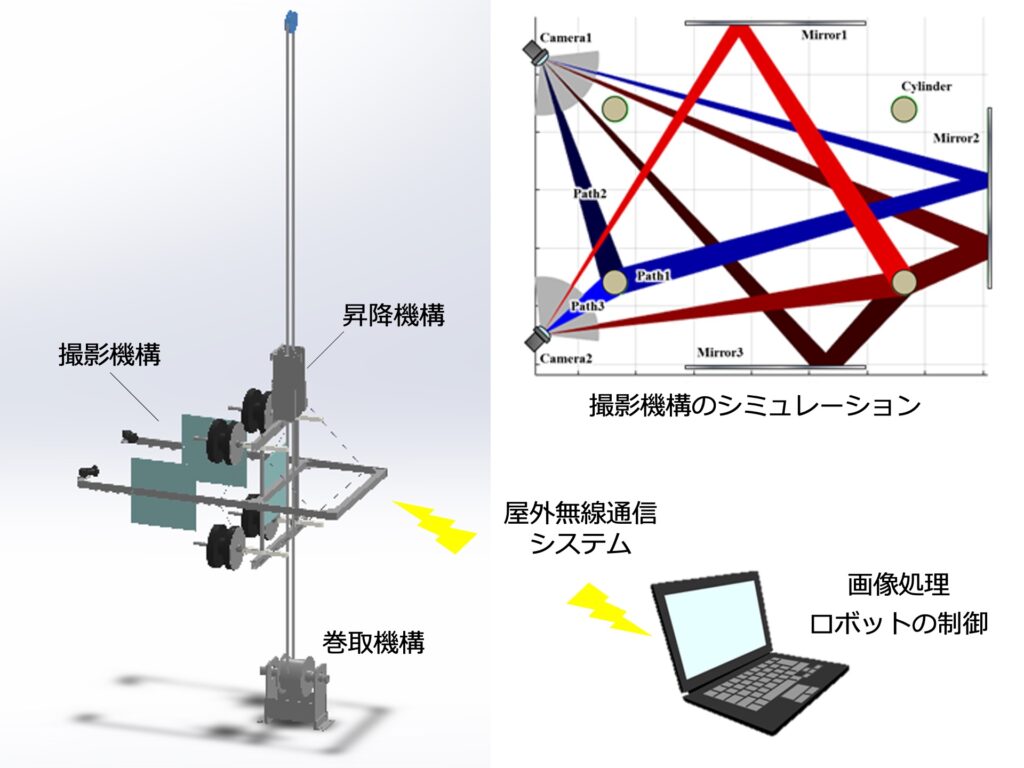
本研究では,インフラの構造を支えるロープ群を対象とした自動点検ロボットの開発を行っています.ロボットは撮影機構と昇降機構を組み合わせています.撮影機構は,ロープ群の周囲にミラーとカメラを配置し,ミラーの反射を利用することでロープ全周の撮影を実現しています.昇降機構は,ロープを登攀する機構を用いています.これらの機構を組み合わせロープの表面全体を撮影することで点検の自動化を図っています.
Development of Lifting System for High-Elevation Inspection Robot Targeting Hanger Ropes