水上 雅人 教授
所属: 室蘭工業大学大学院工学研究科 もの創造系領域
<学部> 理工学部 創造工学科 機械ロボット工学コース
<大学院> 生産システム工学専攻 ロボティクスコース
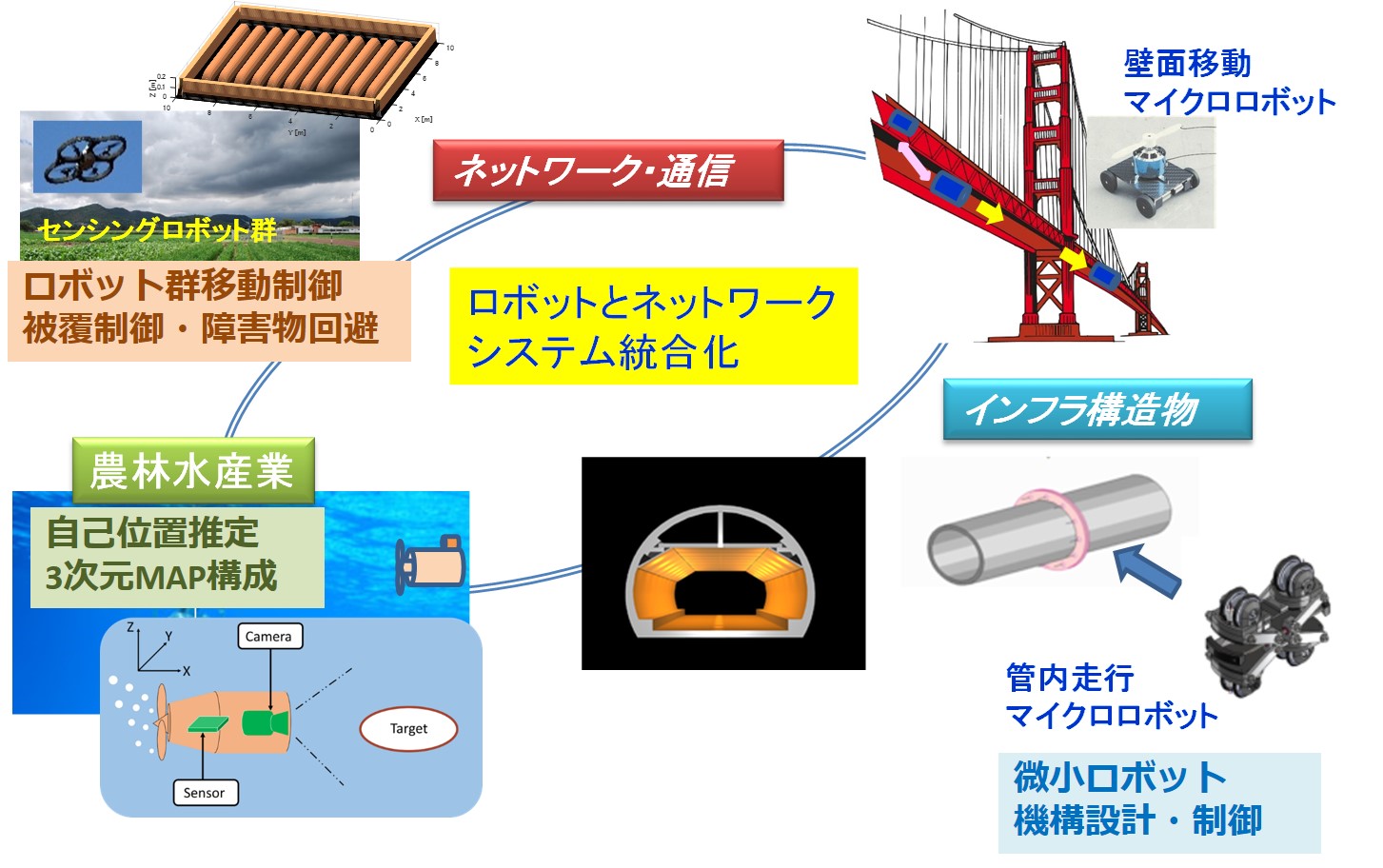
精密メカトロシステム研究室の研究領域イメージ
2026.4 R8年度 新研究室体制発足
2025.3 日本機械学会学生会卒研発表会・支部講演会(室蘭),日本機械学会IIP講演会で学生が発表
2025.;3 精密工学会全国大会にて,管内・壁面移動ロボットの小型化技術に関する研究発表(M2,M1)
2024.8 室蘭工大オープンキャンパスにて,研究室紹介デモンストレーションを実施
2024.4 精密研新体制2024年度発足 M2:4名(うち留学生1名),M1: 4名,B4:6名
2024.3 公益財団法人JKA「狭隘空間における壁面・管路内を自在移動可能な小型多脚ロボットの開発」
補助事業完了
2024.3 公益財団法人電気通信普及財団「自律移動マイクロロボット群制御のための機械学習によるロバスト
自己位置推定」の研究調査助成終了
2024.3 精密工学会全国大会にて,壁面移動ロボットの小型化技術に関する研究発表
2024.3 電子情報通信学会全国大会(広島)にて,B4学生が移動ロボットの自己位置推定に関する研究発表
2024.3 日本機械学会IIP部門講演会(岡山・オンライン)にて,M2,M1学生が研究発表
2024.3 日本機械学会学生会卒研発表会にて,B4学生が研究発表
2023.11 国際会議ASPEN2023(香港)にて,M2学生が壁面移動ロボットのシミュレーションに関する研究発表
2023.10 国際会議IEEE SMC2023(ハワイ)にて,ロボット無線通信に関する発表
2023.10 自動制御連合講演会(仙台)にて,自律移動ロボットの自己位置推定に関する研究発表
2023.9 北海道内ロボット競技大会(ロボットトライアスロン)にて,研究室B4学生チームが2位受賞
2023.9 精密工学会全国大会(福岡)にて,小型壁面吸着ロボット(M1),吸着機構測定用実験系構築(M2)研究発表
2023.9 日本機械学会年次大会(東京)にて,ロボット無線通信に関する研究発表
2023.8 室蘭工大オープンキャンパスにて,研究室紹介デモンストレーションを実施
2023.8 国際会議IEEE CASE2023(オークランド)にて,小型6脚移動ロボットに関する研究発表
2023.8 電子情報通信学会研究会(オンライン)でB4学生が発表
2023.6 日本機械学会ロボティクス・メカトロニクス講演会(名古屋)でM2,M1学生が発表
2023.4 精密研新体制2023年度発足 M2:2名,M1: 4名(うち留学生1名),B4:6名 |
|
専門領域: メカトロ二クス・ロボット技術
2016年5月に本学着任にあたり,発足した新しい研究分野です.企業での通信用メカトロ二クス・ロボット技術の研究開発で培った経験をもとに,ネットワークとロボティクスの融合領域での新しい学術分野の貢献を目指して活動しています
2018.10月〜 精密メカトロシステム研究室として,新体制となりました.
<2026.4.1現在>
D1 1名,M2 4名,M1 5名,B4 9名
班構成: マイクロロボット班 6名,構造物センシング班 7名,自律移動ロボット班 6名 |
|
|


