指の柔らかさの役割の解明
SearchSeeds
研究者紹介Fuculty
Purpose
研究の目的
新たな労働力としてのロボットへの期待に応えるためには、多種多様な物体の把持と操作を人のようにできることが求められている。ハンドや指の構造を工夫することでロボットは多様な物体を扱えるようになる。本研究では柔らかい構造に着目し、多様な物体を扱える柔らかいロボットハンド・指の開発を行う。

Overview
研究の概要
指の柔らかさの役割の解明
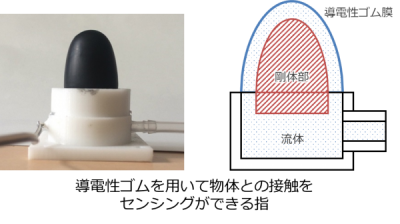
柔らかい指が把持に与える影響を実験的に検証し解析中。柔らかさの異なる指を作成し把持性能を計測し、その原理の解明や力学モデルを構築している。柔らかい指として流体を用いた多機能な多層構造指を開発中。指内部に物体との接触をセンシングできる構造や把持性能を向上させる構造を持った指を試作と性能評価をしている。

Seeds 01 指の柔らかさの役割の解明
[PDF DL]Point
研究(開発)のアピールポイント
研究の新規制、独自性
指の柔らかさがどのようにマニピュレーションに影響しているのか分かっていなかった。本研究の実験やモデル化を通して指の柔らかさの役割が明らかとなった。この知見を活かした多層構造指やセンシング技術の開発を行っている。
研究に関連した特許の出願、登録状況
なし従来研究(技術)と比べての優位性
研究により得られた知見を活かし開発した多層構造のロボット指を用いることで、ロボットの制御系を単純化することができる。
Vision/Stage
研究(開発)のビジョン・ステージ
適応分野
人手で行っている作業(単純な機械では不可)をロボットに置き換えたい分野研究のステージ
基礎研究製品化、事業化のイメージ
産業用ロボットのロボットハンド、産業用ロボットによるマニピュレーションシステム
Suggestion/
Message
企業などへのご提案・メッセージ
研究(開発)に関連して、
あるいはそれ以外に関われる業務
自動化のための計測制御システムの開発に関する相談業務、ロボット教材を用いた教育業務、ロボット製作やロボットシステム開発に関する相談業務、バイオミメティクス技術の社会実装に関する研究等
利用可能な設備、装置など
フォースゲージ、RGB-Dカメラ(Intel Realsense)、三軸直交型ロボット等
教員からのメッセージ
ロボットによるマニピュレーションを中心に研究を展開しております。マニピュレーション技術は労働力不足や技能伝承などの問題解決にとってキーテクノロジーであると思っておりますので、お気軽にご相談ください。