引き込み現象を利用した周期入力制御法
SearchSeeds
研究者紹介Faculty

Purpose
研究の目的
引き込み現象を利用して多数の制御対象を協調制御できる周期入力制御法を構築し、ロボット工学などへの応用を目指す。

Overview
研究の概要
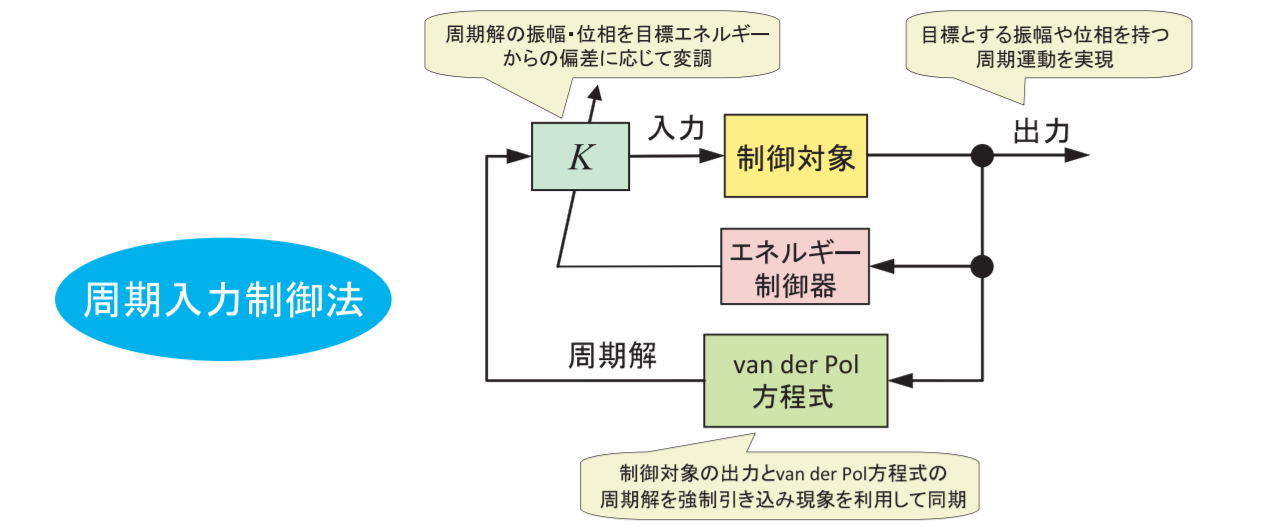
引き込み現象を利用した周期入力制御法
周期的な運動をする制御対象にタイミングよく周期入力を加えることでエネルギーを制御し、目標とする振幅や位相を持つ周期運動に引き込み現象を利用して制御対象を収束させる周期入力制御法の構築をしている。本手法により多数の足を協調させて動かす必要のある多足歩行ロボットの歩行制御や脚に弾性を持つ歩行ロボットで弾性エネルギーを巧みに利用した歩行制御が実現できる。
Seeds 01 引き込み現象を利用した周期入力制御法
[PDF DL]Point
研究(開発)のアピールポイント
研究の新規制、独自性
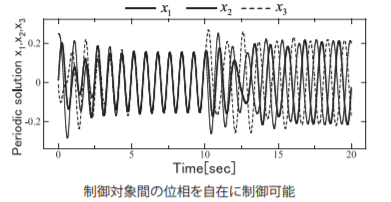
周期入力制御は多数の制御対象のエネルギーと位相関係を同時に制御できる。

研究に関連した特許の出願、登録状況
なし従来研究(技術)と比べての優位性
制御入力と制御対象の出力を同期させるために引き込み現象を利用しているので、制御対象の大まかな特性がわかれば良く、特性の変化に対するロバスト性が優れている。
Vision/Stage
研究(開発)のビジョン・ステージ
適応分野
多数の関節を協調させて動かすロボット制御、多数のロボットの協調制御、周期的な運動をするシステムの制御。研究のステージ
基礎研究製品化、事業化のイメージ
工場ラインでのロボット協調制御、複数のクレーンによる協調運送制御。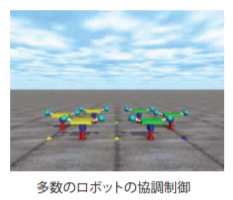
Suggestion/
Message
企業などへのご提案・メッセージ
研究(開発)に関連して、
あるいはそれ以外に関われる業務
自動制御システム・ロボットの設計・試作に関する技術相談、ロボット教材を用いた教育支援。
教員からのメッセージ
制御対象が周期的な運動をしていれば、その振動状態を巧みに操ることができます。振動を消すのではなく、うまく使えば効率よくシステムを制御できる場合があります。ロボット開発だけでなく、振動制御にお困りの方もぜひお問い合わせください。