研究内容Research
研究概要
本研究は航空宇宙システム研究センターと連携して、音速・高高度で飛行する飛翔体の基盤技術のうち超音速機を完全自律で最適に飛行させるための誘導制御技術の研究を行っています。※UAV:Unmanned Air Vehicle(無人航空機)
超音速飛行に向けたUAV制御技術
1. 小型無人超音速機向け離陸滑走を制御する制御系2. 小型無人超音速機向けトラック飛行を実証する制御系
3. 小型無人超音速機向け完全自律着陸を実証する制御系
無人航空機による利用システム
1. 複数無人航空機による同時観測を可能とする高精度・高応答追尾アンテナ制御システム2. クラスター無人航空機による長距離位置情報伝送システム
3.広大な農地の短時間観測を可能とする固定翼UAVを用いた画像伝送技術の研究開発
4.固定翼UAVを用いて遮蔽環境下でも長時間映像伝送可能な中継伝送システム
5.固定翼UAVによる短時間観測のための高精度経路追従飛行技術の研究
実験機材

電動機
研究室全体のテーマとなっており、個人の研究テーマに関わらず全員で取り組んでいます。
電動ラジコン機:カルマート
全長:1,300mm
全幅:1,600mm
重量:約2,650g
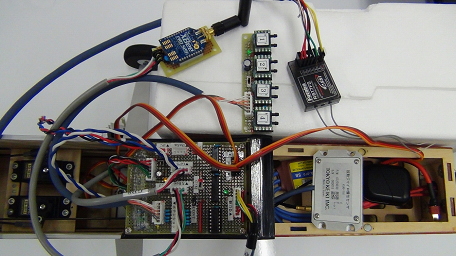
機体内部
マイコンボードを用い、内部計算を行い、制御系コマンドをサーボへ出力しています。
その他自律飛行に必要なデータを取得するため、INS/GPS、ADS、気圧センサ等搭載しております。
このページの先頭へ

