TEL. 0143-46-5341
〒050-8585 北海道室蘭市水元町27-1
研究内容Research
無人航空機による利用システム
5.固定翼UAVによる短時間観測のための高精度経路追従飛行技術の研究
研究概要
近年、農林業分野で無人航空機(UAV)の利用が推進されており、固定翼UAVを用いた広大な農地を短時間で観測を行うシステムの検討がされています。観測においては、固定翼UAVはあらかじめ決められた経路を飛行する必要があり、半円弧と直線により構成されるメアンダー状(蛇行)経路(図1)にて農地部分を観測することを想定しています。高精度経路追従飛行技術の向上のため、「トリム調整及び軸間誤差の推定」と「自動トリム調整技術」と「風外乱下での高精度旋回経路追従技術」についての研究を行いました。
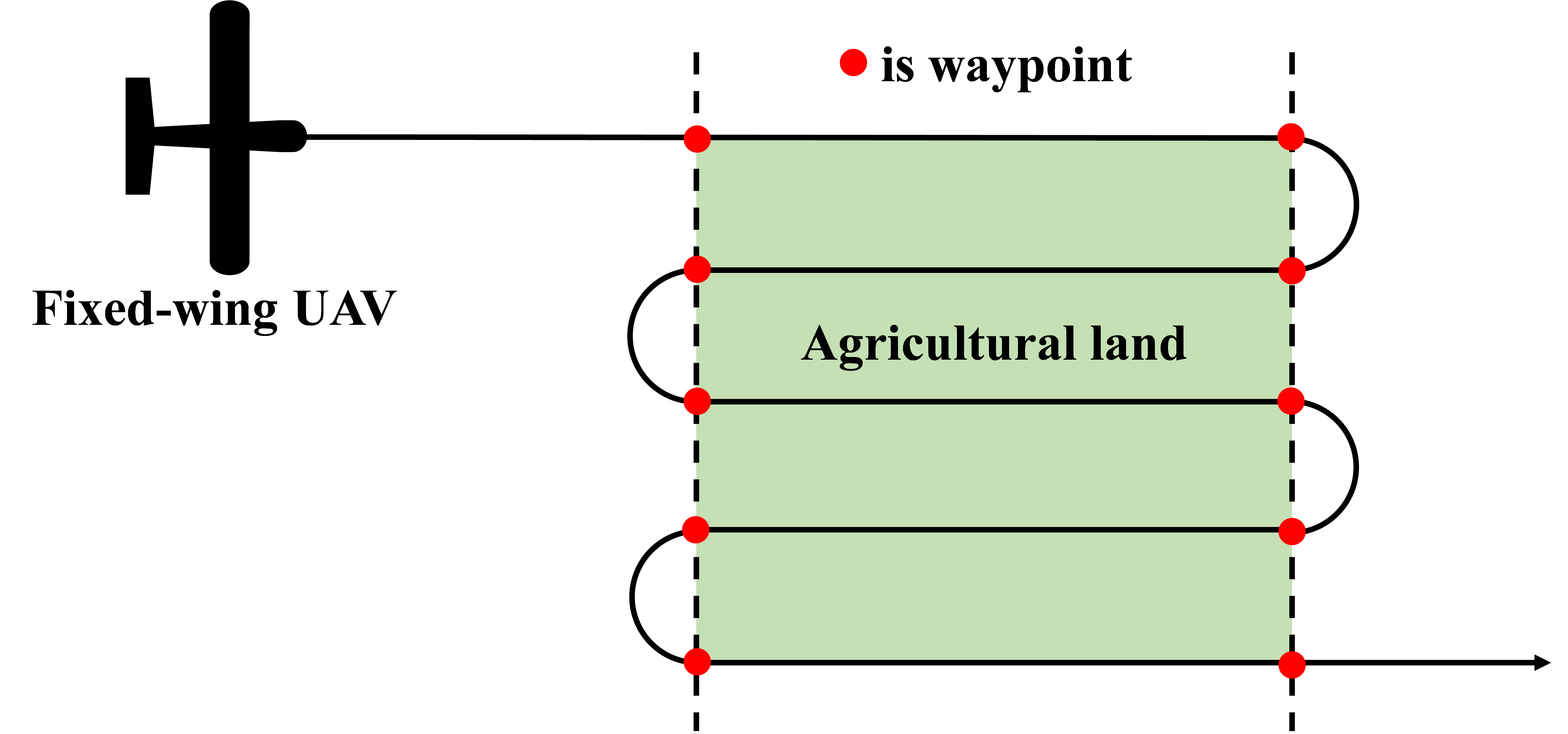
図1 観測のためのメアンダー状経路
本研究はJKA補助事業(オートレース補助事業)を受けて実施しています。
トリム調整及び軸間誤差の推定
目的
自律飛行においては、舵面への制御コマンドゼロの状態において固定翼UAVが定常水平飛行するトリム状態にし、それを実現させるために入力した舵面調整角度量を知ることや軸間誤差を知ることは、高精度な制御の実現のために不可欠です。今回は新規に作成した、定量的に舵面補正角度の入力及び固定翼UAVの状態を把握可能な地上TT&C装置を用いてトリム調整(図2)を行い、計測した速度からセンサ座標軸XS-YS-ZSと機体固定座標軸XB-YB-ZB間の取り付け角誤差である軸間誤差
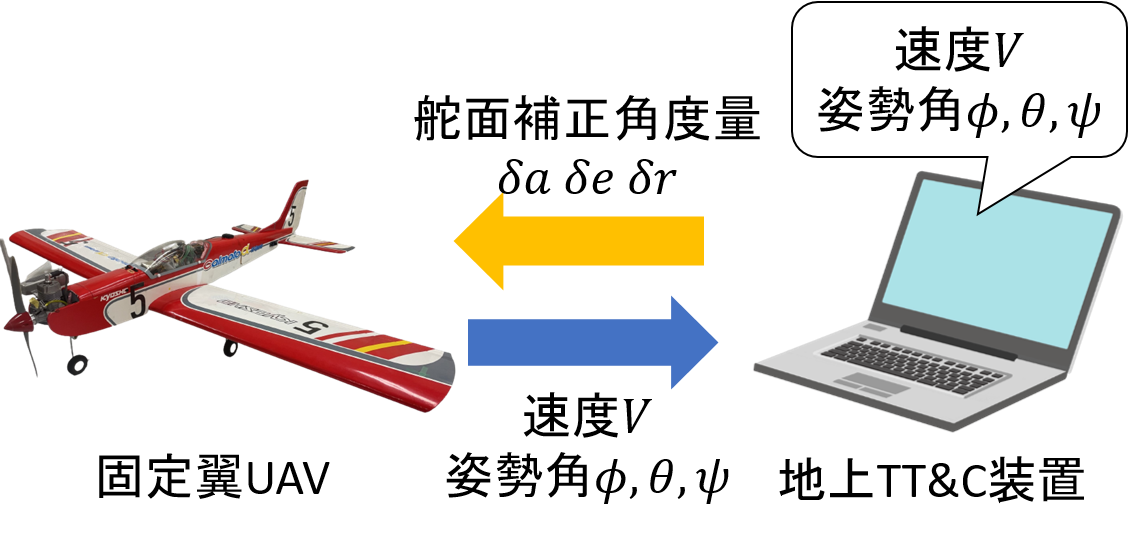
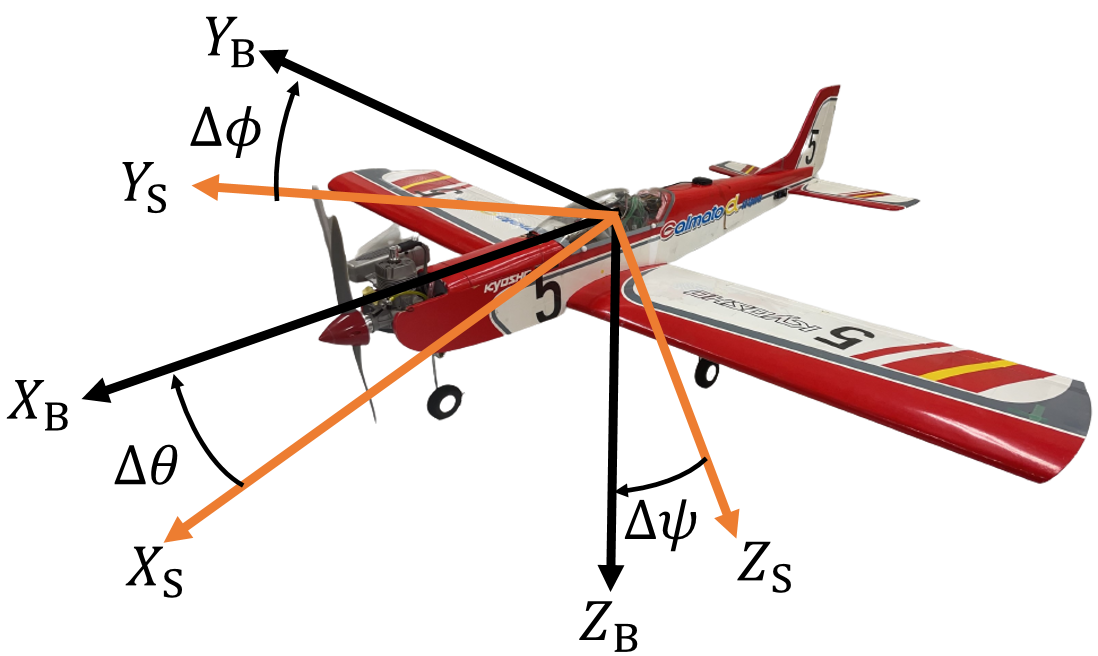
図2 提案手法によるトリム調整 図3 軸間誤差
手法
トリム調整は地上TT&C装置を用いて舵面補正角度量を0.1[deg. ]単位で入力し、地上TT&C装置の画面に出力されるデータを基にトリムが取れている状態かを判断します。トリムの条件は速度と姿勢角が一定であることとします。
センサと機体の軸間誤差の推定は、まずは地上TT&C装置を用いたトリム調整を行い、トリム飛行状態時のデータを取得します。その後各軸周りに回転した時の機体固定座標系の速度とセンサ座標系での速度の関係式を導出し、トリム調整によって取得した速度データを導出した速度の関係式に代入することによって軸間誤差を推定します。
結果
軸間誤差は図4のように推定されました。軸間誤差の値の範囲が大きく、高精度な軸間誤差推定は実現できませんでした。その原因として今回は軸間誤差の推定を簡易に行うため軸間誤差を2軸間のみの速度の関係式から導出したこと、実際の固定翼UAVでのトリム調整では厳密なトリム状態でなく姿勢変動していたことなどの影響があると考えられます。
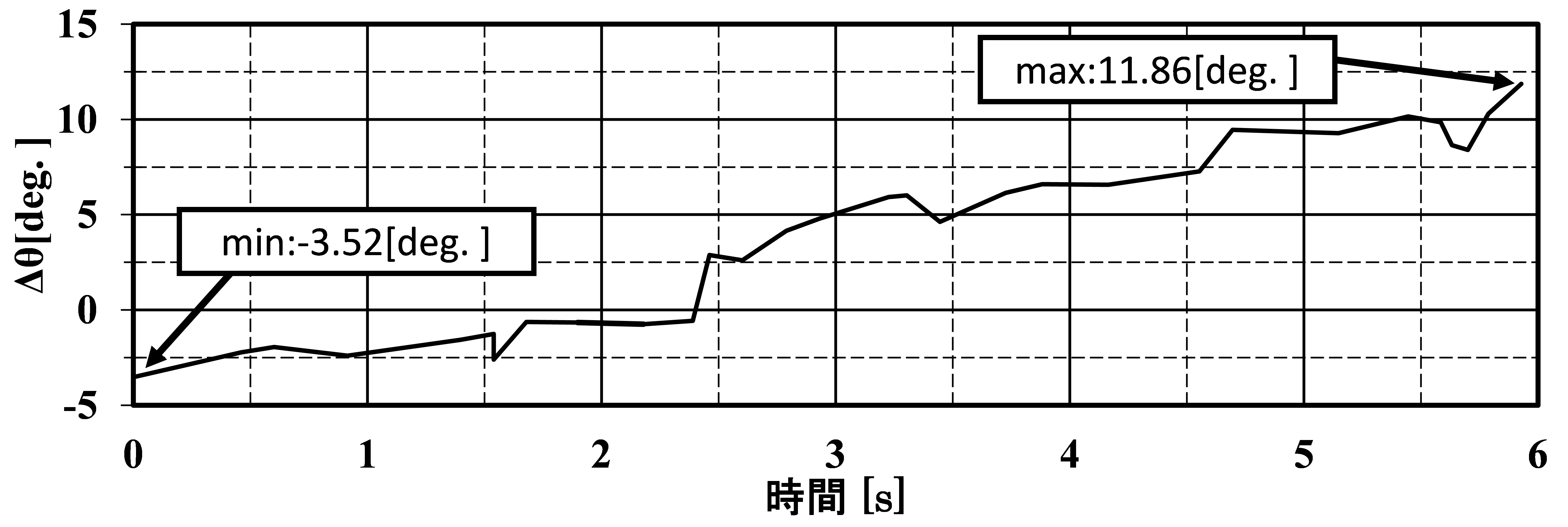
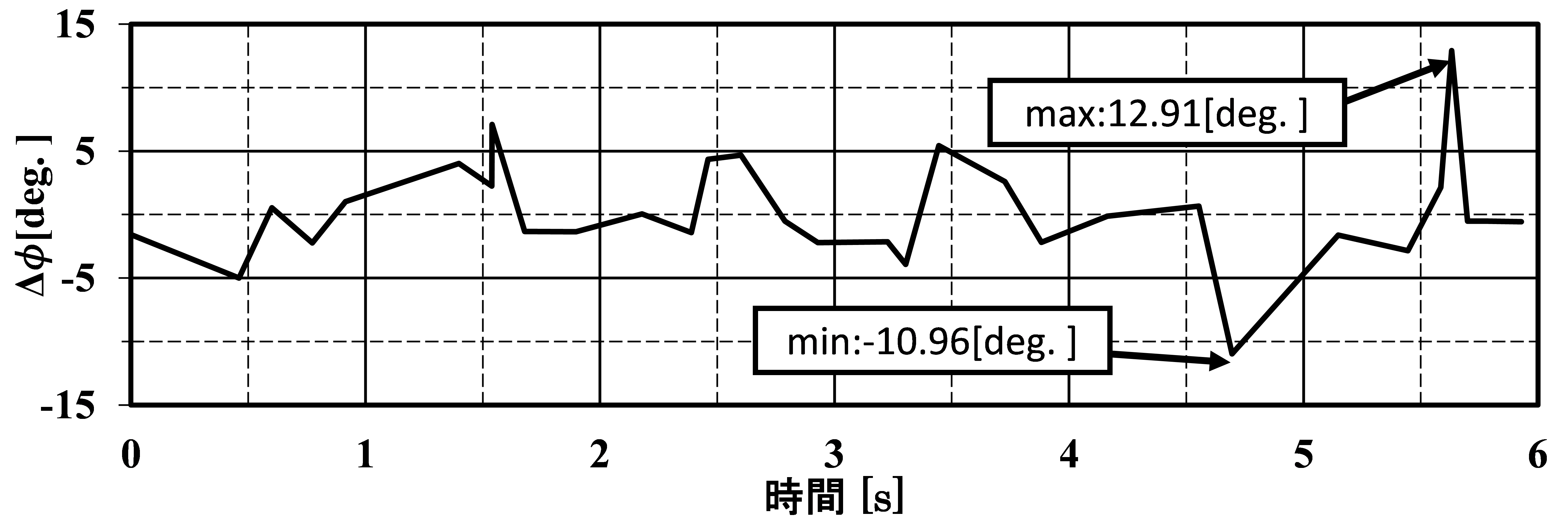
図4-(a) ピッチ角軸間誤差 図4-(b) ロール角軸間誤差
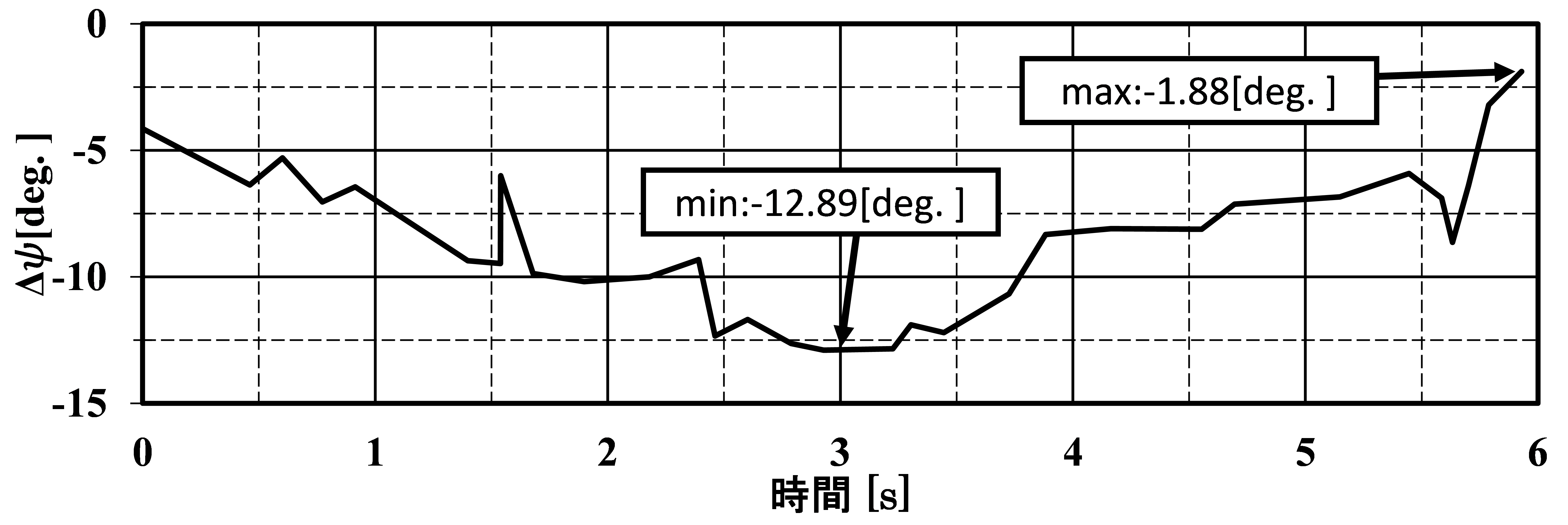
図4-(c) ヨー角軸間誤差
自動トリム調整技術
目的
遠隔操作で手動操縦される無人航空機においてはトリム舵角を人間が判断し調整するが、自動飛行において制御装置が舵角を自動的に調整する手法は公表されていません。特に小型の無人航空機の手動操縦によるトリム調整は目視で行われるため、感覚に依存し定量的ではありません。そこで、制御装置が機体の回転運動を検出し自動的かつ定量的にトリム状態の舵角を決定する手法を考案しシミュレーションで確認しました。
手法
機体が回転運動しているときの各機体軸周りのモーメントを打ち消すように力をエルロンまたはエレベーターで発生させることでトリムを取ります。この時の舵角をトリム舵角とします。トリム舵角を、モーメント係数をはじめとする空力微係数、機体の慣性能率、計測された角速度から定量的に決定します。実際には図5に示す飛行と処理で実現します。
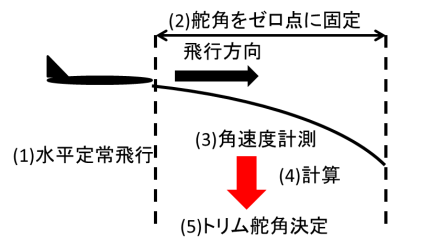
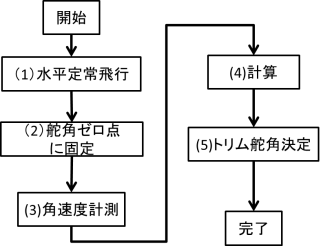
図5 自動トリム調整飛行の想定プロファイルと処理のフロー
(1)トリムが取れている状態と仮定し自動で水平定常飛行を行い機体の回転運動を止める、(2)舵角をゼロ点に固定し飛行しつつ(3)角速度を計測、(4)(5)計測された角速度からトリム舵角を決定の5段階でトリム舵角を決定します。
結果
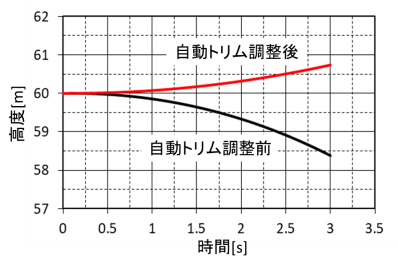
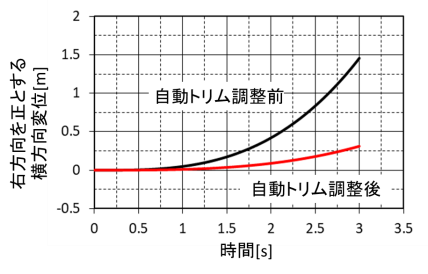
重心位置を機首方向に10cm、右方向に10cmずらした機体をシミュレーション上で飛行させ、本手法の効果を確認しました。シミュレーションの結果を図6に示します。高度変位や横方向変位が小さくなっていることから、効果が認められます。
高精度旋回経路追従技術
目的
従来の旋回区間はロール角一定で旋回飛行を行っていました。しかし、より高精度で追従する為には飛行状況に応じたロール角コマンドに追従する必要があります。そこで、対気速度と 対地速度の観点の力の釣り合いに着目し、ロール角コマンドを生成する手法を提案します。また、釣り合いを満たすロール角コマンドのみでは目標経路からの偏差を抑えることが出来ないため、旋回半径と方位角に着目した方位角制御を付加し、高精度な旋回経路追従を目指します。今回は実機試験を想定した機体を使用したシミュレーションによって確認します。
手法
本旋回経路追従制御は縦及び横方向の力のつり合いを満たすようなロール角制御系(図7)に加えて、旋回半径の誤差を修正する方位角制御系(図8)、対気速度制御系及び高度一定制御系により実現します。これら制御系での制御則は PID としました。また、ロール角コマンドの切り替えは高度偏差を条件として切り替えることとしています。


図7 ロール角制御系のブロック線図 図8 方位角制御系のブロック線図
結果
一定方向の定常風3m/sが吹いているとしてシミュレーションを実施しました。結果を図9に示します。旋回半径は最大約2mの偏差で旋回可能なことが確認できました。また、高度偏差は10mを超えていないので、ロール角コマンドの切り替えは起こっていません。
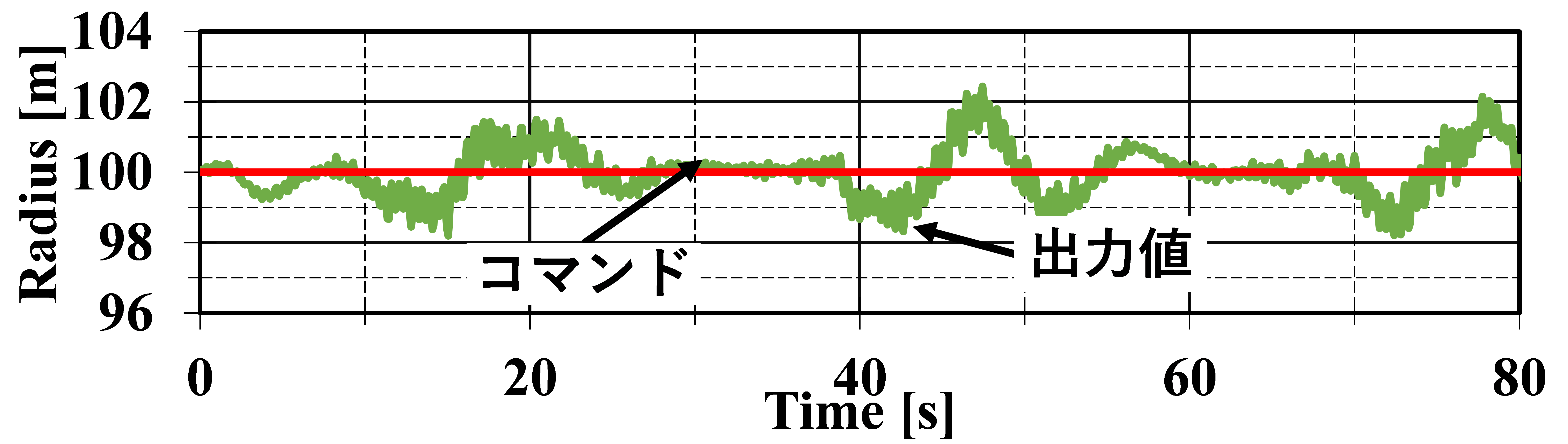
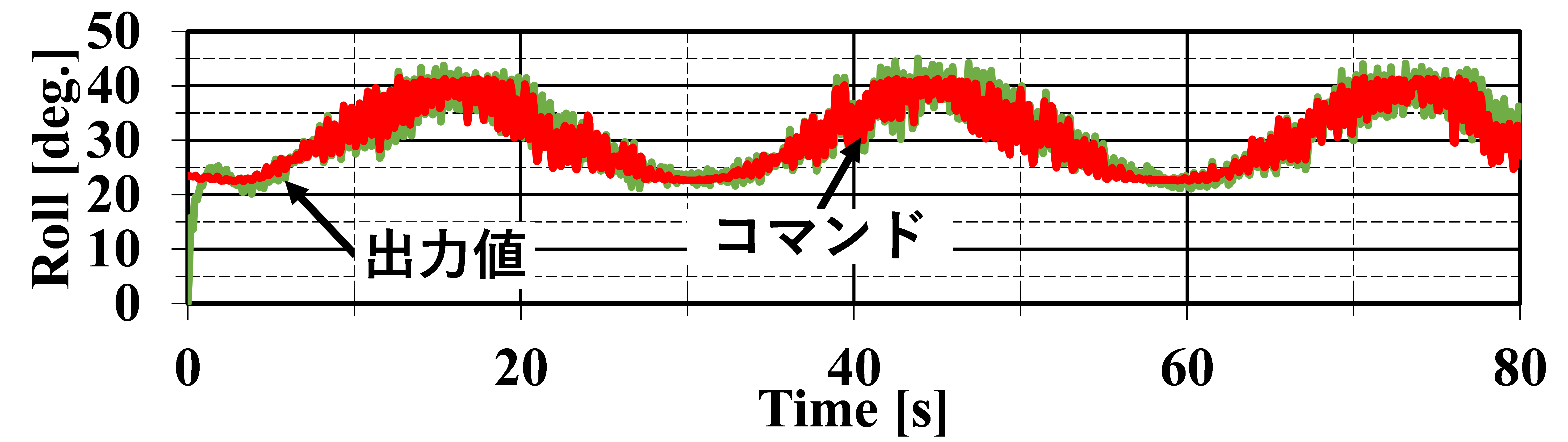
図9-(a) 旋回半径の時間履歴 図9-(b) ロール角の時間履歴
謝辞
本研究は、公益財団法人JKA補助事業(オートレース)「固定翼UAVによる短時間観測のための高精度経路追従飛行技術の研究」(2021M-149)により実施した.
このページの先頭へ

