
国立大学法人 室蘭工業大学
航空宇宙機システム研究センター
プロジェクト研究
超音速無人実験機のシステムに関する研究
室蘭工業大学航空宇宙機システム研究センターにおけるプロジェクト研究の目的は,大気中を高速で飛行するための基盤技術を研究開発し,これを飛翔体システムとして飛行実証することです.研究成果は地上二点間輸送及び地球軌道への往還輸送の両方に活用でき,地上及び宇宙における人類の活動を飛躍的に拡大させるものと考えています.
各専門分野の担当教員が別個に研究を推し進めた場合,システムとしての整合性に問題が生ずる場合が少なくありません.例えば,空力設計の観点ではエンジンは出来るだけ抗力を増大しない位置に配置することを前提としますが,エンジン屋の観点ではエンジンは出来るだけ流れが乱されていない位置に配置したいと願います.システムとして整合のよく取れた機体に対し,革新的な要素技術を加えることは容易ではありません.ホンダジェットの開発経緯はこのことを如実に示しています.
超音速無人実験機プロトタイプ1号機(オオワシ1号)飛行試験
超音速機に求められる翼は,大きく後退した空気抵抗の少ない形状になっていますので、離着陸を含む低速飛行が難しくなっています.そこで低速飛行特性を検証することを主たる目的として,2009年度にプロトタイプ機体(1号機)を設計し,2010年度~2011年度にかけ白老滑空場において飛行試験を実施しました.目的
・滑走、離陸から低速で旋回して着陸するまでの飛行特性の検証
・機体に作用する力の計測
・機体の運動特性の計測
搭載計測機器
エアデータセンシングシステム(室蘭工大作成)
GPS-INS統合測位システム(東京大学殿作成)
加速度センサー
ジャイロ
データーロガー
| 諸 元 | |
|---|---|
| 全長 | 3.1 m |
| 翼幅 | 1.6 m |
| 乾燥重量 | 22.2 kg |
| 離陸重量 | 26.8 kg |
| エンジン | ターボジェットエンジン×2 |
| 最大推力 | 33 kgf (エンジン2基で) |
| 推重比 | 1.2 |
| 最大飛行速度 | 約 370 km/h |

離陸の瞬間

着陸態勢に入るオオワシ
オオワシ飛行の様子(動画)
3度の飛行試験を通じて,安定した着陸の難しさを改めて認識する結果となりました.得られたデータを元に機体の低速での飛行特性を改善した後,より本格的な機体の設計・製作を行う計画です。
1/3スケール量産型オオワシ
デルタ翼無人機における完全自律離着陸制御を確立するには,多数の飛行試験を頻繁に繰り返し,実際の飛行特性をフィードバックする必要があります.このための1/3スケール機体を量産し,白老滑空場および大樹町多目的航空公園における飛行試験を実施しています.本プロジェクトでは研究室の垣根を越えた有志学生タスクフォースにより設計・製造・艤装・試験・評価のサイクルを回し,システム工学教育の実践に大きく資するものとなっています.
| 諸 元 | |
|---|---|
| 全長 | 1.9 m |
| 翼幅 | 0.8 m |
| 離陸重量 | 約5.4 kg |
| エンジン | 電動ダクテッドファンエンジン×1 |
| エンジン推力 | 30N(8セルLiPoバッテリー使用時) |

量産型1/3オオワシ機体

離陸する1/3オオワシ

大樹町多目的航空公園で飛行中の1/3オオワシ
超音速無人実験機(オオワシ2)の開発
計画中の超音速無人実験機オオワシ2は全長7.8m,全備重量300kgとなる予定です.北海道大樹町の 多目的航空公園より離陸し,洋上を旋回して帰還させる予定です.
| 諸 元 | |
|---|---|
| 全長 | 7.8 m |
| 翼幅 | 2.4 m |
| 乾燥重量 | 約260 kg |
| 離陸重量 | 約300 kg |
| エンジン | ガスジェネレーターサイクル エアターボラムジェットエンジン×1 |
| エンジン最大推力 | 360 kgf |
| エンジン推重比 | 11 |
| 最大飛行速度 | Mach 2.0(TBD) |
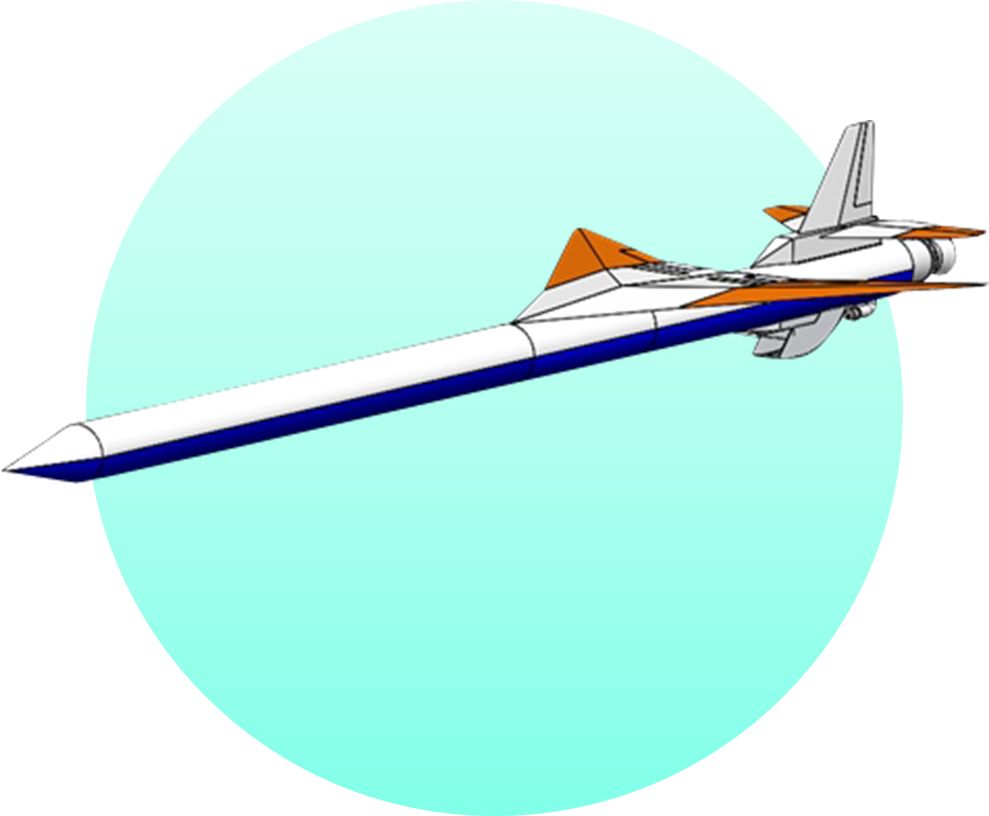
オオワシ2イメージ図