
国立大学法人 室蘭工業大学
航空宇宙機システム研究センター
プロジェクト研究
完全自律飛行可能な小型無人超音速機の実現に向けて
- 誘導制御・遠隔監視制御技術の研究開発-
1.概要
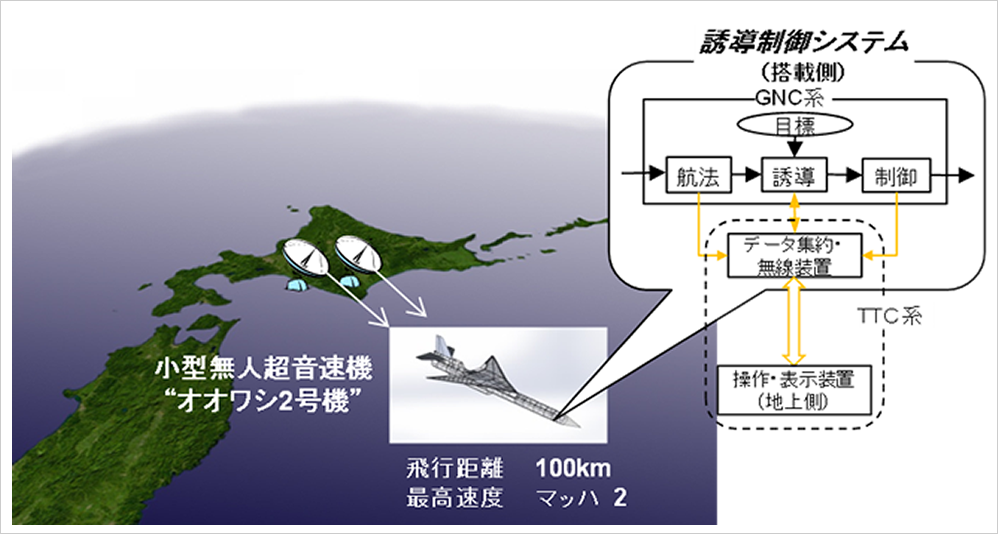
大気中を高速・高々度で飛行する飛翔体実現のための基盤技術の一つである誘導制御技術は、エンジン性能・空力加熱等の条件を満たしつつ、離陸、上昇、旋回、超音速飛行、着陸といった各種飛行モードを自律的にかつ最適に飛行するための重要技術です。本技術を小型無人超音速機オオワシ2号機により実証します。
2.電動模型飛行機を用いた誘導制御システム

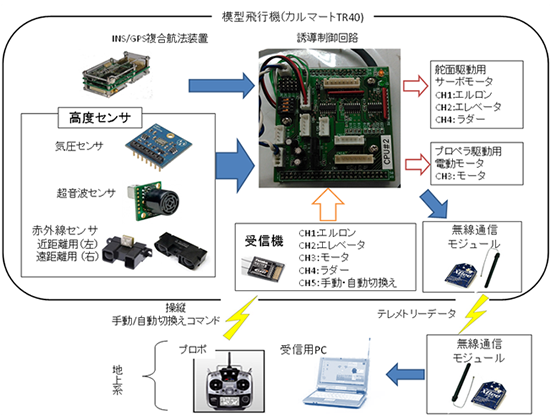
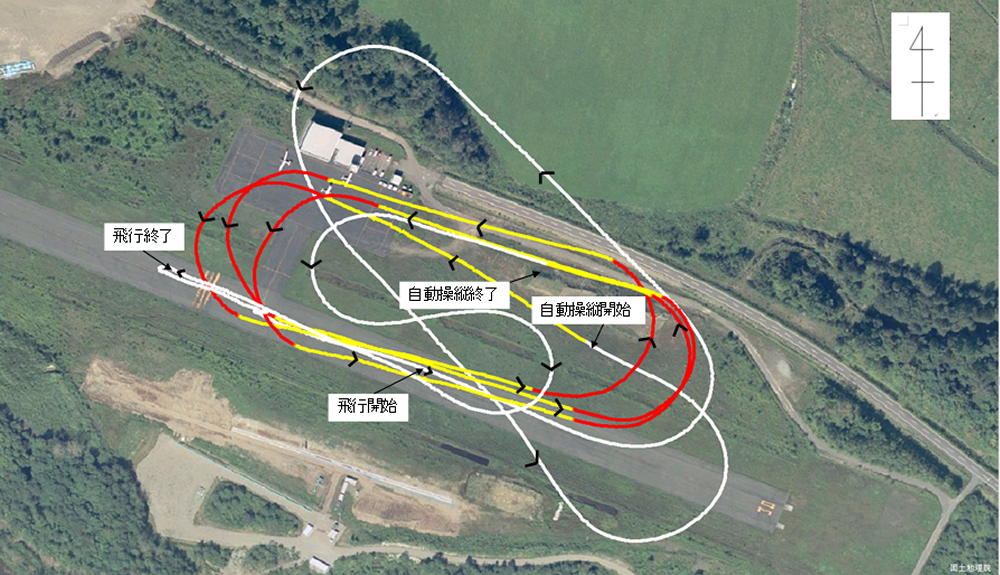
図に示す電動模型飛行機に誘導制御系ならびに遠隔監視制御系を実装し、離陸、上昇、旋回、水平定常、着陸といった各種飛行に必要な基本技術を飛行実験により習得しています。必要な各種センサ、誘導制御回路、無線通信モジュールについては可能な限り市販品により構成しています。直近では本飛行機により、離陸上昇・トラック飛行、着陸飛行実験を実施しました。図は白老滑空場で行ったトラック飛行時の飛行軌跡です。1周約700mのトラックを3周自律飛行しました。
3.小型無人超音速機用誘導制御システム
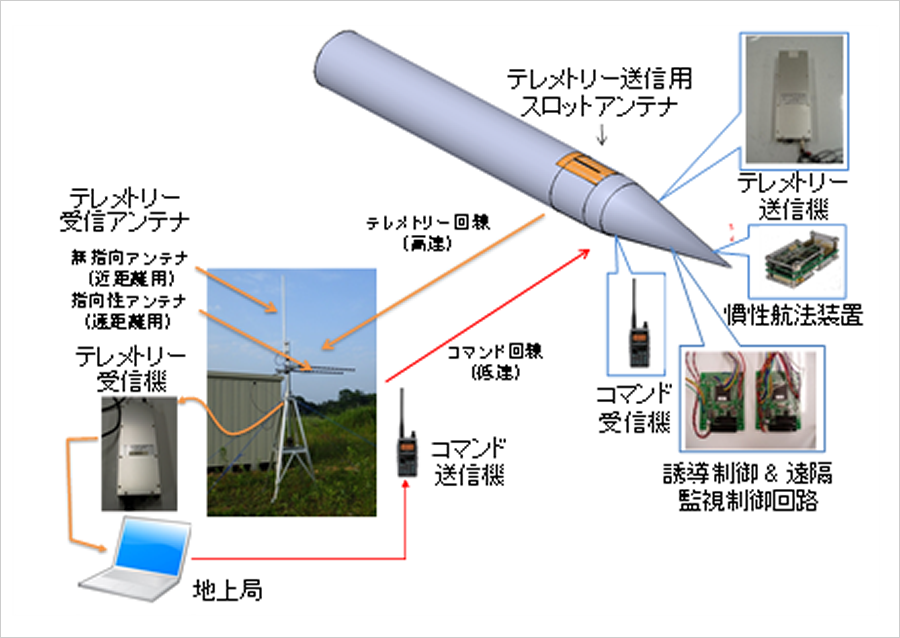
小型無人超音速機を高高度・高速、かつ、長距離自律飛行させるためには、高い安定性とロバスト性を有する高度な誘導制御アルゴリズム、100㎞程度の長距離高速伝送可能とするアンテナをはじめとする無線通信技術が必要です。そのため、誘導制御ソフトウェア、各種センサのデータ取得・アクチュエータへのコマンド送出を行う高性能誘導制御回路、テレメトリー送受信装置、コマンド送受信装置を開発しています。これにより最先端誘導制御アルゴリズム、航空機向け長距離高速無線通信技術等を実証します。
4.飛行実験環境及び操縦訓練
無人航空機の自律飛行を実現するための飛行実験は、白老実験場に隣接する白老滑空場を使用しています。離陸から着陸までを完全自律飛行可能な無人航空機を実現するにあたり、各種飛行モードを技術実証した上で、最終的には全ての飛行モードを統合します。
途中段階の自律飛行でない時は手動飛行させます。これにはラジコン操縦技術が必要であり、そのための操縦訓練も実施しています。
