�⏕���Ɣԍ��@�@2020M-183
�⏕���Ɩ��@�@2020�N�x�n�����ݍ\�����_���}�C�N�����{�b�g�Q�̏�Q�����ʐM����Z�p �⏕����
�⏕���ƎҖ��@�����H�Ƒ�w���H�w���n���H�w�ȁ@�����l
�{�����͋��ւ̕⏕���Ď��{���܂����B
�P�@�����̊T�v
�ǘH����_�����邽�߂̈ړ����{�b�g�Q�Ԃ̒ʐM�������邱�Ƃ�_���Ƃ��āC���݊ǘH�̕ǖʂ�}�̂Ƃ���ꍇ�̓��g�H�Ƃ��Ẵ��f������@�y�ъǘH�ǂ�}�̂Ƃ������`���̌��������s���ƂƂ��ɁC�d�g�`���ɂ�����M����M���������l�������M���������@�Ƃ��āC�e���[�h�����鑽���͑��o�͌n�̐M�����������Ɋւ��C���_�l�@�y�уV�~�����[�V���������{���C�ǘH�Ǔ`���ɓK�����M�����������𖾂炩�ɂ���D����ɁC�ǘH��͋[�����������f�������n�ɂ��C����M����摜�M���̑���M�Ɋւ����{����̌����s���D
�Q�@�����̖ړI�Ɣw�i
�{�����̖ړI�́C�ǘH�ǖʂ�d�g�`���̔}�̂Ƃ��ėp���C����M���E�_�����𑗎�M����ʐM���@�y�ъǘH�ǂ𗘗p�����d�g�`���ɂ�����M����M���������l�������M���������@�̃t�B�W�r���e�B�������邱�ƂƁC�Q���{�b�g�̐ݔ����ړ��ɕK�v�ƂȂ鎩�Ȉʒu����ƕǖʓ`���ɂ��Q���{�b�g�ԒʐM����������Q������ړ�����̗L�p���������邱�Ƃł���D
�����̌��������s�����Ƃɂ��C�]���ۑ�ł������L���`�����K�{�̌`�Ԃ��疳�����������ł��C�i�ق̎Љ�ۑ�ł���C���t���\�����ɂ����郍�{�b�g��p�����_���������Ɏ����邱�Ƃ��\�ƂȂ�ƍl������D
�R�@�������e
�i�P�j�ǘH�ǖʓ`���ʐM���@
�@�@PVC�͗U�d�̂ł��邽�ߓ����ƊO������C�ŋ��܂ꂽ�o�u�b�ǂ��~���`�U�d�̓��g�H�Ƃ��čl���C�~���`�U�d�̓��g�H�ɂ�����}�C�N���g���g���[�h�̉�͂��s�����D���̌��ʁC2.4GHz�C�TGHz�т�WiFi�ŗp��������g���тł̃}�C�N���g��PVC�Ǖǂɉ����ē��g���[�h�Ƃ��ē`�����邱�Ƃ��ł��錩�ʂ����m�F�����i�}�P�j�D
 |
�}�P�@����PVC�ǂɂ�����〖TE〗_00���[�h�̕��U�Ȑ�
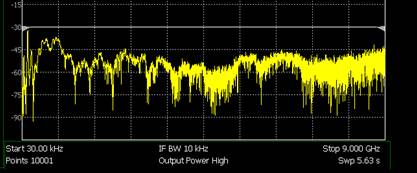
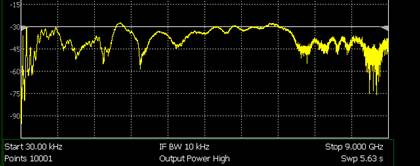
�����ɂ��C5GHz�т̃}�C�N���g��PVC�Ǖǂg���[�h�œ`�����Ă���ƍl���邱�Ƃ��ł��邱�Ƃ��������i�}�Q�j�D���ɁC���ۂ�PVC�ǕǓ`���}�C�N���g���g���[�h��p���ăf�[�^�M���𑗂邱�ƂŁCPVC�Ǖǂ�p�����f�[�^�`���̌������s���C100Mbps�[�������_���M���̓`���E�������m�F�����D
 |
 |
||
�}�Q�@2000mmPVC�ǂł̎��g������
����ɁCCCD�J�����ŎB�e�������A���^�C���̉f���M����4.8�`5.2GHz�̃}�C�N���g��ϒ��������̂��CPVC�Ǖǂɉ����ē`���C������������C�I�V���X�R�[�v�ƃ��j�^�[�Ŕg�`�ƃr�f�I�f�����ϑ�����������s�����D����M�ɂ̓_�C�|�[���A���e�i��p���C�B�e�Ώە��ɂ͑��J�����_�[��p�����D���̌��ʁCCCD�J�����ŎB�e�����Ώە��̖��Ăȉf��������ꂽ�i�}�R�j�D
 |
 |
||
�}�R�@�f���`����������
PVC�Ǖǂɉ����ē`������}�C�N���g���g���[�h��p���ĉf���`�����\�ł��邱�Ƃ��m�F�����D�����̌��ʂ��C�ǘH�ǂ�}�̂Ƃ����M���`�������a140mm�̍aPVC�ǂł��\�Ȃ��Ƃ𖾂炩�ɂ����D
�i�Q�j�M���������@
PVC�ǘH�ɉ����ē`������}�C�N���g���g���[�h���g�p�����}�C�N���g�ʐM�ւ� MIMO (Multi-Input Multi-Output) �����̓K�p�ɂ��`���l���e�ʂ̑���̉\���ɂ���3�����d���E�V�~�����[�V�����ɂ�茟�������{�����D
�V�~�����[�V�����Ɏg�p���� PVC �ǂ̒����� 1 m�C�ǂ̊O�a��
140 mm�C�ǂ̓����� 4.1 mm �ł���DPVC �Ǖǂ̒[���ɑS�� 54 mm �̃_�C�|�[���A���e�i���p�x 180 �x�łQ�ݒu�����D�}�S��MIMO�`���n�̐M�����f���������C
 |
|
�}�S�@MIMO�`���n�̐M�����f��
���� 1
m ��PVC �Ǖǂɉ����ă}�C�N���g��`���������ꍇ�̓`��������-24.0 dB �ƂȂ����D����CPVC �ǘH�����}�C�N���g��`���������ꍇ�̑����� -25.2 dB ��PVC �Ǖǂɉ����ē`�������ꍇ�Ɣ�r���Ė� 1.2 dB �傫���Ȃ����D�����f���Ƃ��CPVC�ǂɎ��t�����A���e�i�ƕ��s�ȕ����̕��ʂɓd�E���W������ PVC �ǂ�`�����邱�Ƃ����炩�ƂȂ����D�����̓`����������Z�o���ꂽPVC �Ǖǂɉ����ă}�C�N���g��`���������ꍇ�� 2.4 GHz �ɂ�����`���l���e�ʂ́C�� 11.8 bit/s/Hz �ƂȂ���.���ɁC�Q�̑��M�|�[�g�ƂQ�̎�M�|�[�g�̑��Έʒu�W��ς��C�e�`���`���l���̋�ԑ��֊W��ς��邱�Ƃɂ��C�`���l���e�ʂ̑������\�������������D���M�|�[�g�ɑ��Ď�M�|�[�g�̈ʒu���X�O�x��]���������f���ł́C��M�d�͂��ቺ���C�`���l���e�ʂ��ቺ���邽�߁C���M�|�[�g�Ǝ�M�|�[�g�̑��Έʒu�W������ł���ꍇ���ł��`���l���e�ʂ������Ȃ邱�Ƃ����炩�ƂȂ����i�}�T�j.�����̌��ʂ��CPVC�Ǖǂɉ����ē`������}�C�N���g���g���[�h�𗘗p�����ʐM�V�X�e���ɂ����āCMIMO �ʐM�ɂ��`���l���e�ʑ��傪�\�ł��邱�Ƃ𖾂炩�ɂ����D
 |
�}�T�@�`���l���e�ʂ̃V�~�����[�V��������
�i�R�j�Q���{�b�g�̏�Q������ړ�����
�����ɂ�鉓�u������m�F���邽�߁C���^�Ǔ����s���{�b�g�ɃR���p�N�g�Ȗ����ʐM��H�������s�����߂ɕK�v�ƂȂ�@��\���Ɋւ��錟�����s�����D�Ǔ����s���{�b�g��T���̈ړ�������@�Ɋւ��錟����i�߂��D �}�U�Ɉړ�������@�Ɋւ���V�~�����[�V�������ʂ������D�ړ�����Ɋւ��đO��ւ̈ړ�����A���S���Y�����������C�����s�����D�{�A���S���Y���ɂ��C�ǖʂɊ����邱�ƂȂ��CT����Ǔ��ł̈ړ����\�Ȍ��ʂ����D
 |
�}�U�@�ړ�������@�Ɋւ���V�~�����[�V����
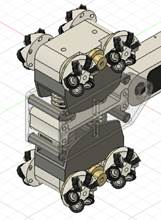
100�o�ǘH�����s�p���{�b�g(�}�V)��p���āC�V�~�����[�V�������ʂ̑Ó������������D��Ă����ړ�����A���S���Y����p���āC�s����̑��j���\�ƂȂ邱�Ƃ������ꂽ�i�}�W�j�D
 |
 |
||
�}�V�@�Ǔ��ړ����{�b�g�O�ρ@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�}�W�@�Ǔ��ړ�����
�@��Ă����Ǔ����s�p���{�b�g�ł͈��萫�ɉۑ肪�c���Ă����D�����ŁC�����`���������w�����C����ǂ�Ȋǂɑ�����葖�s�����Ɍ������s�����ƂƂ����D���̂��߁C�Ώ۔z�Ǔ��a��65mm����1�Q0mm�ƕύX���C�A���e�i�n�������\�Ȃ悤�ɃK�C�h�����\������ȂǁC���ǎ{���i�߂��D�}�X�ɉ��ǎ���@�̍\���������D
 |
 |
||
�}�X�@���ǎ���@
������H�����̗\�������Ƃ��āC�}�P�O�̌����m�F�����@�����삵���D�}�P�P�̐����H���\�z���C�����`�����m�F�\�Ȃ��Ƃ��m�F�����D���̖�����H���x�[�X�ɖ����A���e�i�n�̎���������i�߂Ă����D
 |
�}�P�O�@������H�����p���؋@
�}�P�P�@������H�����p���ؗp�����H
�S�@�{���������Љ�ɂǂ���������邩�\�W�]
�{�����ŊJ�����ꂽ��Q�����ʐM����Z�p�����p�������C�]���^�̊Ǔ����s���{�b�g�ŕK�{�ƂȂ�M�����P�[�u����d�͓`���P�[�u�����s�v�ƂȂ邽�߁C��菬�^�ȊǓ����s���{�b�g��p�����_����C��蕡�G�ȊǘH�\���ɑ��Ă��K�p���ł���Ƃ��������ɉ��l����H�w�I�L�p����������D���̂��ߏ]���͓_��������ł������a�ǘH�ɑ��Ă��C�����I�Ɍ������s�����Ƃ��ł��邽�߁C�C���t���\�����_�������{�b�g�ɂ�鎩�����������ł��C�i�ق̎Љ�ۑ�̉������������邱�ƂɊ�^�ł���ƍl����D
�T�@�����E�������̗���ɂ����鍡���̈ʒu�Â�
����܂łɃC���t���_���������Ɏ�����_�����{�b�g�̏��^���\���Ɋւ��錤�������{���Ă���C�S���ʈړ����\�Ƃ���ǘH�����s���{�b�g�C�ǖʋz���^�ړ����{�b�g�C���r�^�ړ����{�b�g�̋@�\�n�y�ѐ���Ɋւ�����@�̒�Ă�{�b�g�̐����ʂ��āC�_���������Ɋւ���m���y�я��^���{�b�g����Z�p��~�ς��Ă����D
�{���ƂŌ����J��������Q�����ʐM����Z�p�ł́C�ǘH�ǂ�}�̂Ƃ������{�b�g�Ԃ̐M���`���̗l�q���m�F�ł��C�f���ʐM�̎��{�\���𖾂炩�ɂ��邱�Ƃ��ł����CMIMO�Z�p�̊��p�ɂ��C���ۂ�PVC�ǂł̍\���`�Ԃł���X�g���[�g�ǁC�ȊǁC����ǂւ̓K�p���\�ƂȂ錩�ʂ����D���������āC�]���^�̊Ǔ����s���{�b�g�ŕK�{�ƂȂ�M�����P�[�u�����s�v�ƂȂ邽�߁C��菬�^�ȊǓ����s���{�b�g��p�������G�ȊǘH�\���ɑ��ēK�p���ł���\�������o�����Ƃ��ł����D����͑���M�A���e�i�����ǂ��C���^�ړ����{�b�g�Ɏ������āC���ۂɑz�肳���PVC�Ǎ\���ł̎��؎����Ɋւ��錤���𐄐i���Ă��������D
�U�@�{�����ɂ������m���E���\�_����
[1]���������C�����l�C�g���^�Ǔ����s���{�b�g�ɂ�����ǘH�������ʐM��H�����̌����h�C2020�N�x�����H�w��H�G���w�p�u����u���_���W�CH01�C�I�����C�� 9��1���`7���i2020�j
[2]�O�㔹��,�����l,�ԓ����F,�������F,�h �a�Ǔ����s�}�C�N�����{�b�g�̑S���ʈړ��@�\�̏��^���v�h�C
��R�W����{���{�b�g�w��w�p�u����u���_���W�C AC3C2-03(1)-(2)�C�I�����C���C10��9���`11���i2020�j
[3]�O�㔹��,�����l,�ԓ����F,�������F,�g���J�i���z�C�[����p�����Ǔ����s�p���{�b�g�̈ړ��@�\�v�Ɋւ��錟���h�C���{�@�B�w��k�C���x����58��u����u���_���W�C 3��5���C���H�s�E�I�����C���i2021�j
[4]��ԑ���,�g�c���C,���c���i,���c���F,�����l,�h PVC�Ǖǂɉ����ē`������}�C�N���g���g���[�h�̒ʐM���p�ւ̊�b�����h�C2021�N�x�d�q���ʐM�w������u���_���W�CC-14-20�C�����E�I�����C���C3��9���`12���i2021)
[5]��ԑ���,��c�_�S��,���c���i,���c���F,�����l�C�g�o�u�b�ǕǓ`���}�C�N���g���g���[�h��p�����r�f�I�f���`���h�C2022�N�x�d�q���ʐM�w������u���_���W�CC-14-5�C�V���E�I�����C���C3��15���`17���i2022)
[6]���c���F,���c���i,�����l�C�h PVC�Ǖǂɉ����ē`������}�C�N���g���g�p����MIMO�ʐM�̊�b�����h, 2022�N�x�d�q���ʐM�w������u���_���W�CC-14-6�C�V���E�I�����C���C3��15���`17���i2022)
[7]�R�����C,�����l,���c���i,���c���F�C�g�a�Ǔ����s���{�b�g�̊ǘH�ǖʒʐM�Ɋւ����b�I�����h�C���{�e�B�N�X�E���J�g���j�N�X�u���� '22�C���{�@�B�w��{�e�B�N�X�E���J�g���j�N�X����C1A1-D09�C�D�y�C6��2���`3���i2022�j
�V�@�⏕���ƂɌW�鐬�ʕ�
�i�P�j�⏕���Ƃɂ��쐬��������
�Y���Ȃ�
�@
�i�Q�j�i�P�j�ȊO�œ����Ƃɂ����č쐬��������
�@�@�@�O�q�̔��\�_���Ȃ�
�W�@���Ɠ��e�ɂ��Ă̖₢���킹��
�����@�֖��F�@�����H�Ƒ�w���H�w���n���H�w��
�i���������R�E�M���E�_�C�K�N���R�E�K�N�u�\�E�]�E�R�E�K�b�J�j
�Z�@�@�@���F�@��050-8585
�k�C�������s������27-1
�S�@���@���F�@�����@�����l�i�~�Y�J�~�}�T�g�j
�S�������F�@�@�B���{�b�g�H�w�R�[�X�i�L�J�C���{�b�g�R�E�K�N�R�[�X�j
E-mail�F�@m-mizukami@mmm.muroran-it.ac.jp
�t�q�k�F�@http://www3.muroran-it.ac.jp/pmechsys/index1.html